
Murciélago de herradura menor
Este proyecto describe la creación de los llamados. detector de murciélagos: un dispositivo que le permite escuchar y grabar los sonidos de los murciélagos. Probablemente sepa que los murciélagos emiten ultrasonidos para la ecolocalización. La frecuencia de estos sonidos está fuera del rango perceptible por el oído humano, por lo que no se pueden escuchar directamente. El detector de murciélagos utiliza un micrófono especial capaz de captar estos sonidos de alta frecuencia y convertirlos en sonidos que se encuentran dentro del rango audible.
Hay tres tipos de detectores de murciélagos . Para mi hice un heterodinodetector. Su desventaja es que hace más difícil distinguir diferentes tipos de murciélagos en comparación con la grabación de sonidos de alta frecuencia. Más adelante explicaré cómo funciona un detector heterodino, pero primero veamos el micrófono necesario para grabar ultrasonido.
Al elegir un micrófono, al principio consideré dos opciones:
- un micrófono electret - todo lo que encontré, según los documentos, funciona solo en el rango de 10 a 20 kHz, pero si cree en algunos recursos, algunos de sus tipos también perciben el ultrasonido hasta cierto punto. Sin embargo, dado que sus descripciones oficiales no especifican esto, se necesitaría mucho ensayo y error para revisar las distintas marcas y probarlas. Así que renuncié a este tipo de micrófono.
- sensores piezoeléctricos... Se encuentran, por ejemplo, en los populares telémetros ultrasónicos HC-SR04, que son ubicuos y baratos. Su desventaja es que su sensibilidad está muy cerca de la frecuencia resonante, alrededor de 40 kHz. Y al alejarse de esta frecuencia, la sensibilidad cae bruscamente. Entonces tampoco encajan.
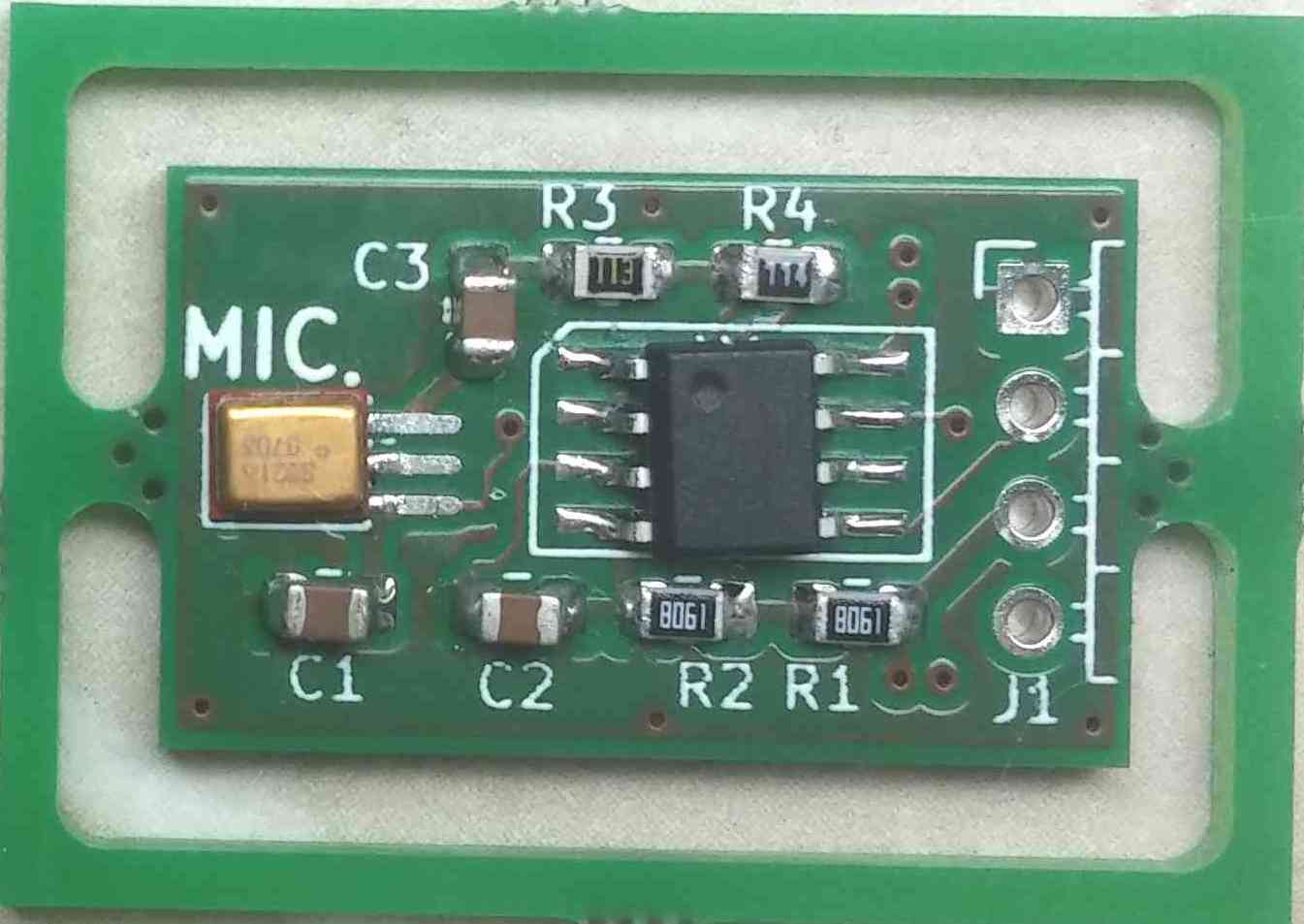
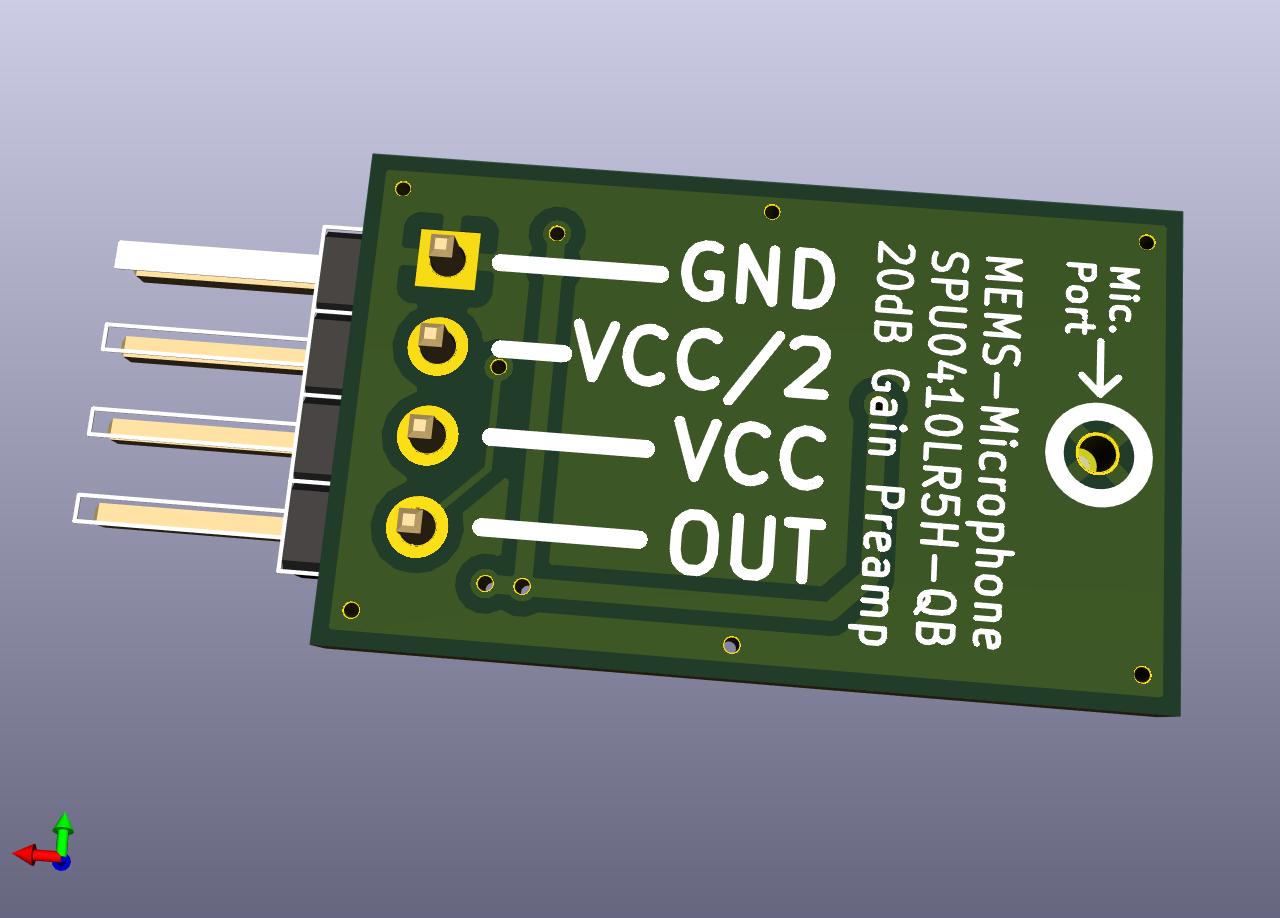
En cambio, terminé encontrando un micrófono Knowles SPU0410LR5H , un micrófono tipo MEMS... Según la especificación, este micrófono tiene una curva de respuesta bastante plana en todas las frecuencias hasta 80 kHz, por lo que es muy adecuado para este proyecto. Además, tiene un preamplificador interno de alta relación señal / ruido. La principal desventaja de este micrófono es que su carcasa no está pensada para proyectos caseros. Es diminuto (¡3,76 x 3 mm!), Y sus contactos están dentro de la caja. Busqué en Internet y encontré la página del usuario hackaday.io Alan Green, quien también usó este micrófono en su proyecto. Se le ocurrió una buena idea para hacer una placa especial para este micrófono, para poder soldarlo manualmente. El punto es alargar las almohadillas para que sobresalgan del componente. Tomé esta idea y diseñé una placa pequeña para un micrófono y un amplificador operacional dual. Este último proporciona una tierra virtual (a la mitad de la tensión de alimentación), así como una etapa de amplificación de 20 dB (es decir, 10 veces). Al principio, era escéptico sobre soldar este micrófono a mano, pero todo funcionó bien: las 6 placas que soldé tuvieron éxito. Grabé un video de la soldadura para aclarar. El diseño de los tableros también se hace público .

Comencemos explicando el principio de funcionamiento de un detector de murciélagos heterodinos. Primero, veamos las señales emitidas por los ratones. Se pueden modelar como una frecuencia portadora ultrasónica modulada en amplitud de señal y una señal envolvente como un "chirrido" corto es la señal (una señal con modulación de frecuencia lineal ).
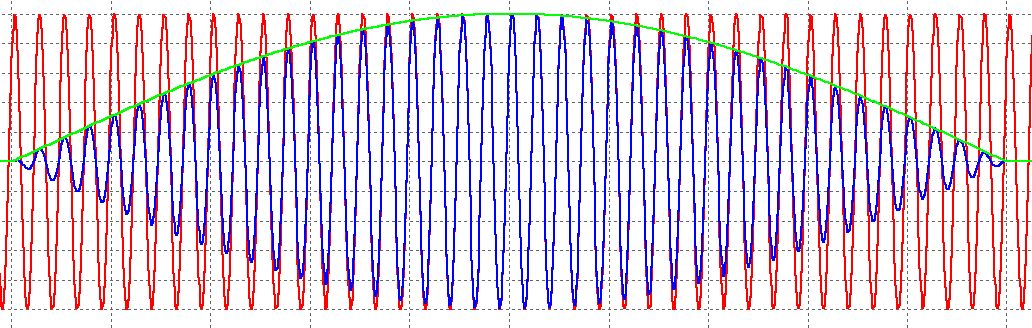
En el diagrama de ultrasonido, el portador se muestra en rojo, la envolvente del chirrido se muestra en verde y la suma total se muestra en azul. Para traducir la señal al rango audible para humanos, debe convertirla para preservar la envolvente (chirrido), modulándola con una señal portadora con una frecuencia más baja (por ejemplo, en el rango de 1-5 kHz). ¿Cómo se puede lograr esto?
Para entender cómo se hace esto desde un punto de vista matemático, usamosidentidades trigonométricas conocidas :
2sin (x) ⋅sin (y) = cos (x - y) −cos (x + y)
2cos (x) ⋅cos (y) = cos (x - y) + cos (x + y)
2sin (x) ⋅cos (y) = sin (x - y) + sin (x + y)
2cos (x) ⋅sin (y) = - sin (x - y) + sin (x + y)
Si tomamos nuestro modelo de señal de murciélagos, se puede modelar de la siguiente manera:
portadora (t) = sin (2πf c t)
chirp (t) = sin (2πf chirp t)
bat (t) = portadora (t) ⋅chirp (t)
donde es la frecuencia ultrasónica portadora - f c , y la frecuencia de la señal chirp - f chirp . Para este ejemplo, suponga:
f c = 40 kHz
f chirp = 1 kHz
Aplicando identidades trigonométricas, obtenemos:
bat (t) = sin (2πf c t) ⋅sin (2πf chirp t) = 1/2 cos (2π (f c −f chirp ) t) - 1/2 cos (2π (f c + f chirp ) t)
La señal modulada consta de dos frecuencias ubicadas simétricamente alrededor de la frecuencia portadora, en este ejemplo
40 kHz - 1 kHz = 39 kHz
40 kHz + 1 kHz = 41 kHz
Este es el LSB inferior y la banda lateral superior del USB :
f LSB = f c −f chirrido
f USB = f c + f chirrido
Ahora podemos usar el mismo principio para convertir la señal del mouse a una frecuencia audible más baja. Para hacer esto, debe multiplicar la señal por la frecuencia del generador de LO local; esta es la diferencia entre la frecuencia portadora de la señal y la frecuencia portadora deseada (en nuestro caso, la frecuencia audible a la que nos gustaría escuchar los gritos de los murciélagos). Esta técnica se llama heterodyning En nuestro ejemplo, digamos que queremos escuchar los gritos de los ratones a una frecuencia de 5 kHz, que es claramente audible para los humanos. Entonces:
f objetivo = 5 kHz
f LO = f c −f objetivo = 35 kHz
LO (t) = sin (2πf LO t)
Poniéndolo todo junto, podemos reescribir los términos de las ecuaciones usando identidades trigonométricas:
bat (t) ⋅LO (t) = (1/2 cos (2πf LSB t) −1/2 cos (2πf USB t)) ⋅sin (2πfLOt)
= 1 / 2cos (2πf LSB t) ⋅sin (2πf LO t) - 1 / 2cos (2πf USB t) ⋅sin (2πf LO t)
= 1/4 (sin (2π (f LO −f LSB ) t) + sin (2π (f LO + f LSB ) t) - sin (2π (f LO −f USB ) t) - sin (2π (f LO + f USB ) t))
(considerando que sin (−x) = - sin (x)),
= 1/2 (−1 / 2sin (2π (f LSB −f LO) t) + 1 / 2sin (2π (f USB −f LO ) t) + 1 / 2sin (2π (f LSB + f LO ) t) - 1 / 2sin (2π (f USB + f LO ) t))
= 1/2 (−1 / 2sin (2π (fc - f LO -f chirp ) t) + 1 / 2sin (2π (fc - f LO + f chirp ) t) + 1 / 2sin (2π (fc + f LO - f chirrido ) t) - 1 / 2sin (2π (fc + f LO + f chirp ) t))
= 1 / 2cos (2πf target t) ⋅sin (2πf chirp t) + 1 / 2cos (2πf 2 t) ⋅sin (2πf chirp t)
Se puede ver que el primer término, cos (2πf target t) ⋅sin (2πfchirp t) es exactamente lo que queremos, una envolvente chirp modulada con una frecuencia audible de 5 kHz. El segundo término es nuevamente una señal chirp modulada a una frecuencia más alta, f 2 = f c + f LO , en este caso 75 kHz. El segundo componente está muy fuera del rango audible y el filtro de paso alto en el circuito detector de murciélagos lo corta fácilmente.
Ahora que tenemos una comprensión teórica de cómo se puede utilizar el principio heterodino para construir un detector de murciélagos, ¿cómo lo ponemos en práctica? Lo principal es multiplicar la señal de entrada por la señal LO, lo que en la electrónica práctica no es tan fácil de hacer. Hay circuitos para la multiplicación analógica (por ejemplo, la celda de Gilbert), y podemos usar un IC adecuado (como NE612 ) junto con un generador de onda sinusoidal (por ejemplo, un generador de puente de Wien ). Sin embargo, tal solución será difícil y los circuitos integrados para multiplicación analógica como NE612 o similares son raros y costosos.
Resulta que hay una opción más simple y se puede ensamblar a partir de componentes estándar comunes. Podemos montar un mezclador de frecuencia con conmutación analógica. Si bien este no es un mezclador perfecto ya que en realidad no multiplica ambas señales, pronto veremos que todavía funciona bastante bien.
Por ahora, veamos los diagramas y tratemos de averiguar cómo funciona.
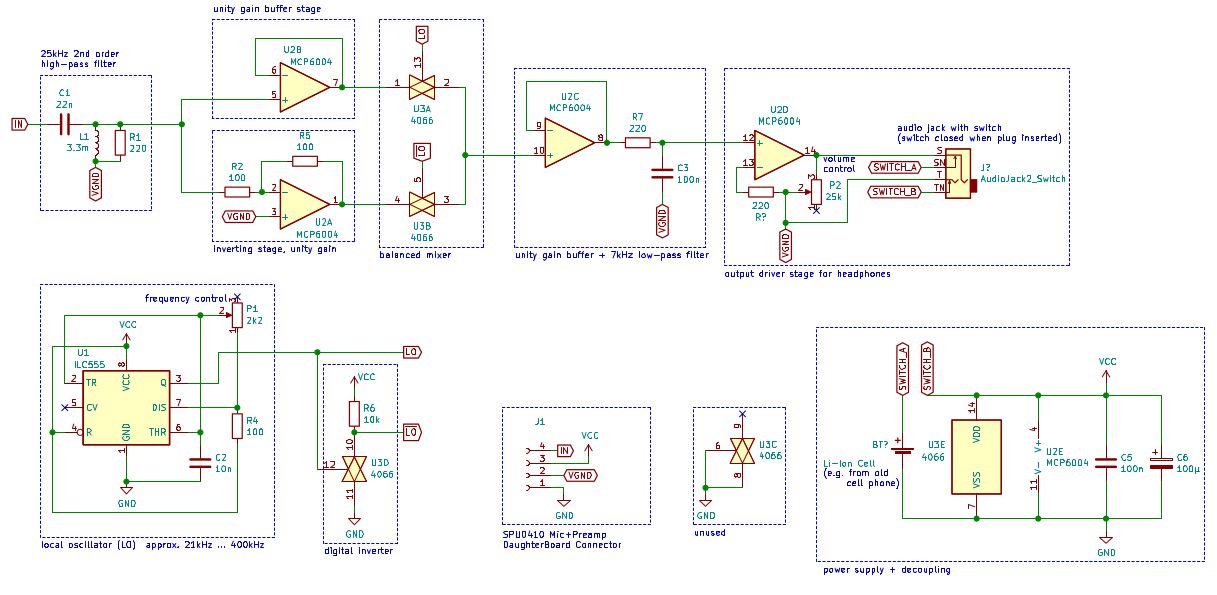
A la izquierda en el diagrama, la salida del micrófono se alimenta a un filtro LC de paso alto de segundo orden, que elimina las frecuencias audibles por debajo de 20 kHz y permite que solo pasen los ultrasonidos (ya que esto es lo que necesitamos). Se requiere la resistencia R1, paralela al inductor, que amortigua la resonancia.
Después del filtro de paso alto, la señal llega a dos etapas de amplificadores operacionales, con coeficientes de 1 y -1 (es decir, invierte la señal). Ahora tenemos tanto la señal del mouse como su contraparte invertida.
En la parte inferior izquierda del diagrama se puede reconocer un multivibrador biestable con el famoso IC 555... El potenciómetro P1 puede monitorear todo el circuito y crear una onda cuadrada con un ciclo de trabajo de ~ 50% y una frecuencia variable de 20 kHz a 400 kHz. En nuestro caso, será la señal del oscilador local LO, pero a diferencia de nuestro modelo matemático, esta onda es cuadrada, no sinusoidal. La señal LO llega a la etapa inversora, que consta de un interruptor analógico U3D y una resistencia R6. Aquí el interruptor analógico se utiliza como inversor digital, y dado que el CD4066 IC tiene 4 interruptores analógicos, tenemos dos de repuesto, uno de los cuales se puede usar como inversor y ahorrar en componentes. Funciona de manera simple: si la señal LO es baja, el interruptor está abierto y R6 saca la señal de salida del interruptor hacia arriba. Si la señal es alta, la llave está cerrada y la salida de la llave está conectada a tierra. Así es como se obtiene una señal invertida. .
Ahora veamos la parte del circuito etiquetada como “mezclador balanceado”. La señal del mouse no invertida se envía a un interruptor analógico que controla la señal LO. La señal invertida se alimenta a otra tecla, que controla la señal. . Las salidas clave están conectadas. ¿Qué hace esta parte del circuito?
Consideremos el caso donde la señal LO es 0 (baja) y por lo tanto la señal 1 (alto). En este caso, la tecla inferior U3B está cerrada y la tecla superior U3A está abierta. Por tanto, pasa una señal de ratón invertida. En el caso contrario, cuando la señal LO es 1 (alta), y por lo tanto la señal 0 (bajo)., El interruptor inferior U3B está abierto y el U3A superior cerrado. Entonces pasa la señal no invertida. Recuerde que esta conmutación ocurre a una frecuencia fLOdeterminada por el ciclo del temporizador 555.
¿Se puede modelar matemáticamente este comportamiento? Básicamente, este circuito mezclador multiplica la señal por una onda cuadrada que cambia entre +1 y -1. Esto es equivalente a cambiar la señal de salida entre invertida y no invertida. Tal onda (llamémosla r (t)) puede ser descrita por la llamada.con la funciónsigno (x):
Por lo tanto, a la salida del mezclador, obtenemos el producto bat (t) ⋅r (t). Por sí solo, esto todavía no explica nada: para comprender cómo se produce la mezcla de frecuencias, debemos aplicar una magia matemática llamada expansión de la serie de Fourier. Te ahorraré la conclusión y te daré el resultado de inmediato. De hecho, usando la serie de Fourier, se puede demostrar que:

Entonces, nuestra onda cuadrada + 1 / -1 consiste en un conjunto infinito de sinusoides con una frecuencia fundamental f LO y sus factores impares. ¿Qué se sigue de esto? Si ignora la constante 4 / π, puede ver que r (t) es la suma de LO (t) y otras frecuencias más altas adicionales LO 3 (t), LO 5 (t), y así sucesivamente. A partir de cálculos anteriores, hemos demostrado que:

Por tanto, se puede calcular que:
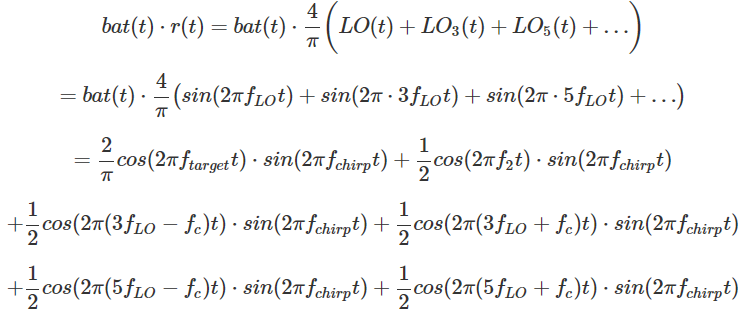
Vemos de nuevo que el primer término 2 / π cos (2πf target t) ⋅sin (2π f chirp t) es lo que queremos, sin embargo, con nuestro mezclador conmutable analógico imperfecto terminamos con un montón de otros términos innecesarios. Sin embargo, todos estos componentes de frecuencia innecesarios tienen frecuencias mucho más altas que nuestro objetivo f objetivo . Por lo tanto, podemos usar un filtro de paso alto para eliminar estos componentes y obtener una señal final aproximadamente igual a 2 / π cos (2π f target t) ⋅sin (2π f chirp t).
Si volvemos al circuito, entonces la salida del mezclador llega a la etapa de búfer y luego al filtro RC de paso bajo con una frecuencia de acoplamiento de ~ 7 kHz. La última etapa del amplificador proporciona una ganancia ajustable y sirve como controlador de salida (por ejemplo, auriculares).
Para comprender mejor cómo funciona la mezcla de frecuencias, hice un simulador de circuito en LTSpice . Puede descargar los archivos de simulación y jugar con ellos.
Un par de notas sobre los componentes. Quería que todo el circuito funcionara con una sola batería de iones de litio, ya que tengo un montón de teléfonos antiguos y similares. Por lo tanto, todo el circuito debe funcionar con una fuente de alimentación de 3 a 4 V. Por lo tanto, el temporizador 555 y el interruptor analógico 4066 deben seleccionarse en forma de CMOS; ya funcionan a 3 V. Usé el CD4066B y el ILC555. Un amplificador operacional cuádruple también debe funcionar a bajo voltaje; Elegí MCP6004, que uso mucho.
No puse el tablero, soldé todo en el tablero. Si desea hacer su propio dispositivo con una placa, descargue el diagrama para KiCAD... Imprimí la carcasa del dispositivo y las perillas para ajustar el volumen y la frecuencia en una impresora 3D. La alimentación se enciende automáticamente cuando inserta los auriculares en el conector. Un LED rojo intermitente indica encendido. La placa del micrófono se encuentra dentro de la carcasa detrás de un pequeño orificio (en la imagen de la derecha).

Para calibrar la escala de frecuencia, verifiqué la salida del 555 en un osciloscopio y marqué las frecuencias en la carcasa. Luego dibujé la escala en la computadora y la imprimí.
Y esto es lo que todos estábamos esperando. ¿Cómo suena el grito de los murciélagos en un detector? Les ofrezco una grabación de un fragmento que grabé alrededor de las 10 de la noche cuando vi el LM volando junto a una linterna en el parque. La frecuencia se ajusta a 40-45 kHz.
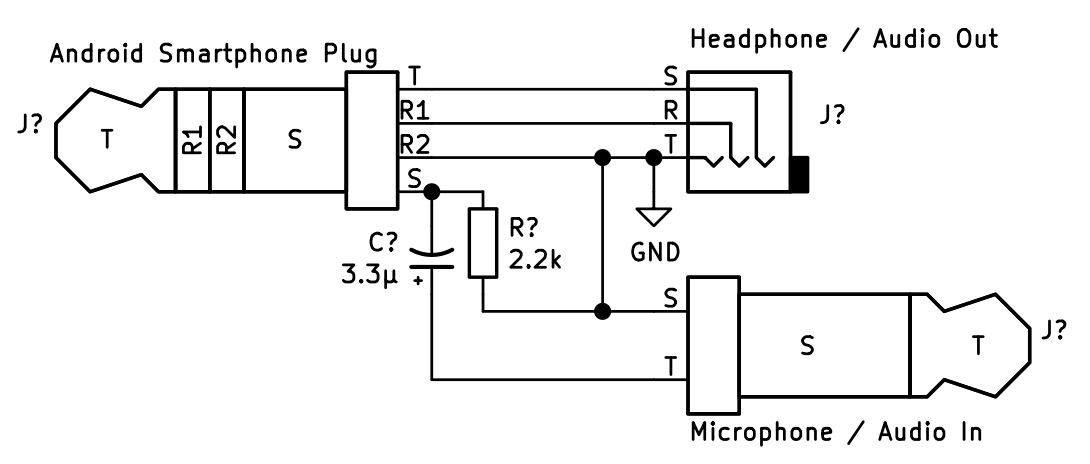
Para grabar sonido, sostuve mi teléfono inteligente al lado de los auriculares del detector, pero parecía muy tonto, así que decidí buscar una mejor opción. Resultó que la mayoría de los teléfonos inteligentes tienen una entrada de micrófono en el conector para auriculares; solo necesita usar un enchufe de 3.5 mm con 4 contactos. Por lo tanto, desarrollé un adaptador que permite que el detector se conecte a la entrada de micrófono de un teléfono inteligente y auriculares, a la salida de auriculares del teléfono inteligente. Para que el teléfono inteligente reconozca que tiene un micrófono conectado, se necesita una resistencia de 2.2 kΩ y un capacitor de 3.3 μF para desacoplar la señal.

También tuve que buscar una aplicación que pudiera grabar y reproducir audio al mismo tiempo para poder escuchar los sonidos grabados en tiempo real. Estaba contento con la aplicación RecForge II , aunque probablemente haya otras.
Si desea montar su propio detector LM heterodino y necesita un micrófono MEMS ultrasónico listo para usar, puede encontrarlo aquí:
No hay amplificador operacional en estas placas, por lo que también necesitará hacer uno. El resto de ingredientes será fácil de encontrar en tu tienda favorita.
Ver también: