
(Betaflight 4.1, aún no lo he filmado en una nueva configuración)
Último artículo - De Ground a FPV Quadrocopter: Introducción
El otro día, decidí actualizar a Betaflight 4.2 y todos a mi alrededor me recomiendan habilitar el filtrado con DShot bidireccional. Por cierto, estaba en 4.1.
Primero, comprendamos un poco qué es el filtrado y por qué es necesario.
De forma predeterminada, Betaflight proporciona configuraciones de filtrado generales adecuadas para la mayoría de los modelos. Pero para lograr el mejor rendimiento, el filtrado se puede ajustar de manera diferente, ya que puede ser excesivo o no suficiente para un dron maltratado.
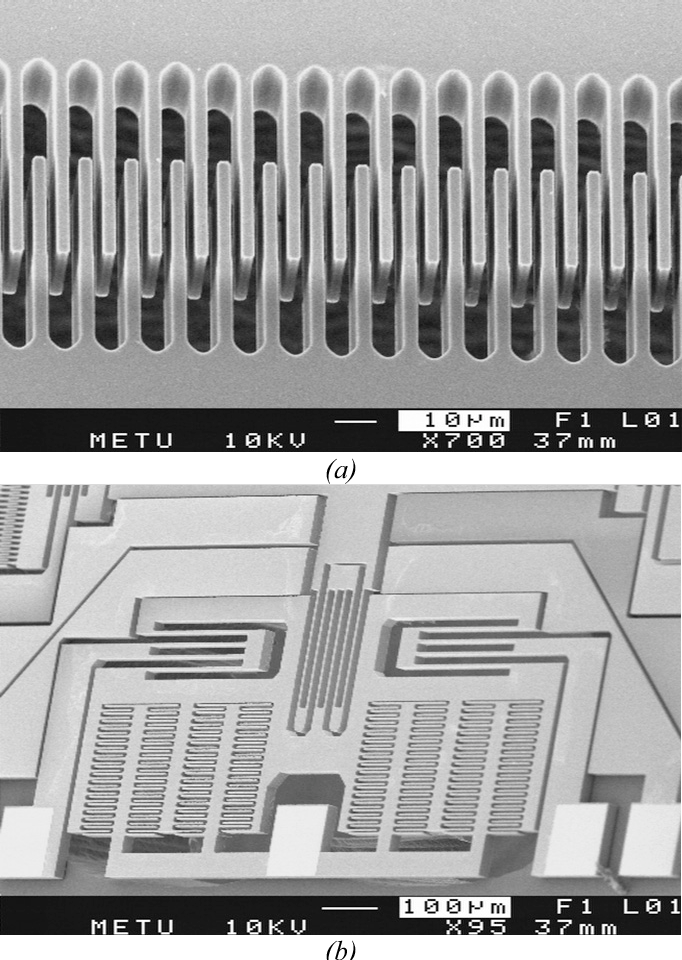
Giroscopio MEMS
Cada quadcopter tiene un FC - Controlador de vuelo, que es esencialmente un cerebro. Estos controladores también tienen un chip digital, que a menudo se llama giroscopio. Es un sensor que detecta el movimiento. Contiene un pequeño dispositivo electromecánico llamado MEMS (Micro Electro Mechanical System).
Hay "enchufes" resonantes mecánicamente dentro de este dispositivo. Estos enchufes están ubicados en los tres ejes (inclinación, balanceo, guiñada) y en movimiento (parte mecánica) crean fluctuaciones de voltaje (parte eléctrica).
Las fluctuaciones de voltaje (fluctuaciones) son, de hecho, ondas analógicas que se convierten en información digital para su procesamiento por el controlador de vuelo. Cuando decimos 8k gyro, significa que 8000 veces por segundo, la señal analógica se convierte a digital y es procesada por el controlador, el firmware, en este caso Betaflight.
ruido
Ruido es un término que escuchamos mucho, pero ¿qué es? Como regla, inmediatamente imaginamos ruido de sonido o ambiente ruidoso en el próximo hormiguero de 23 pisos.
El giroscopio y el controlador PID enfrentan un problema similar. Dado que el giroscopio se encuentra en el controlador de vuelo, que está conectado al marco, experimenta ruido. El ruido puede provenir de: motores, hélices, velocidad del viento, ruido general del marco, electrónica, etc.
Controlador PID
El controlador PID es un sistema que ajusta la posición del quadcopter de acuerdo con los palos (su control) o una posición determinada (bueno, lo que sea). El PID se ajusta mediante 3 parámetros: P, I y D. Desafortunadamente, en este artículo no consideraremos el ajuste del PID en detalle. Si es piloto, ya lo sabe, y si es principiante, habrá un artículo separado sobre este tema.
Este sistema funciona bien cuando la cantidad de ruido es mínima, de lo contrario, podemos enfrentar problemas como la oscilación (vibración) o el sobrecalentamiento de los motores.
El término d en un controlador PID está especialmente relacionado con el ruido. D suaviza los movimientos rápidos, pero calcular D en el controlador PID aumenta significativamente el ruido en la señal. Esto significa que el ruido del giroscopio se amplifica significativamente por el valor del término D y, por lo tanto, estamos filtrando en dos lugares: el giroscopio y D.
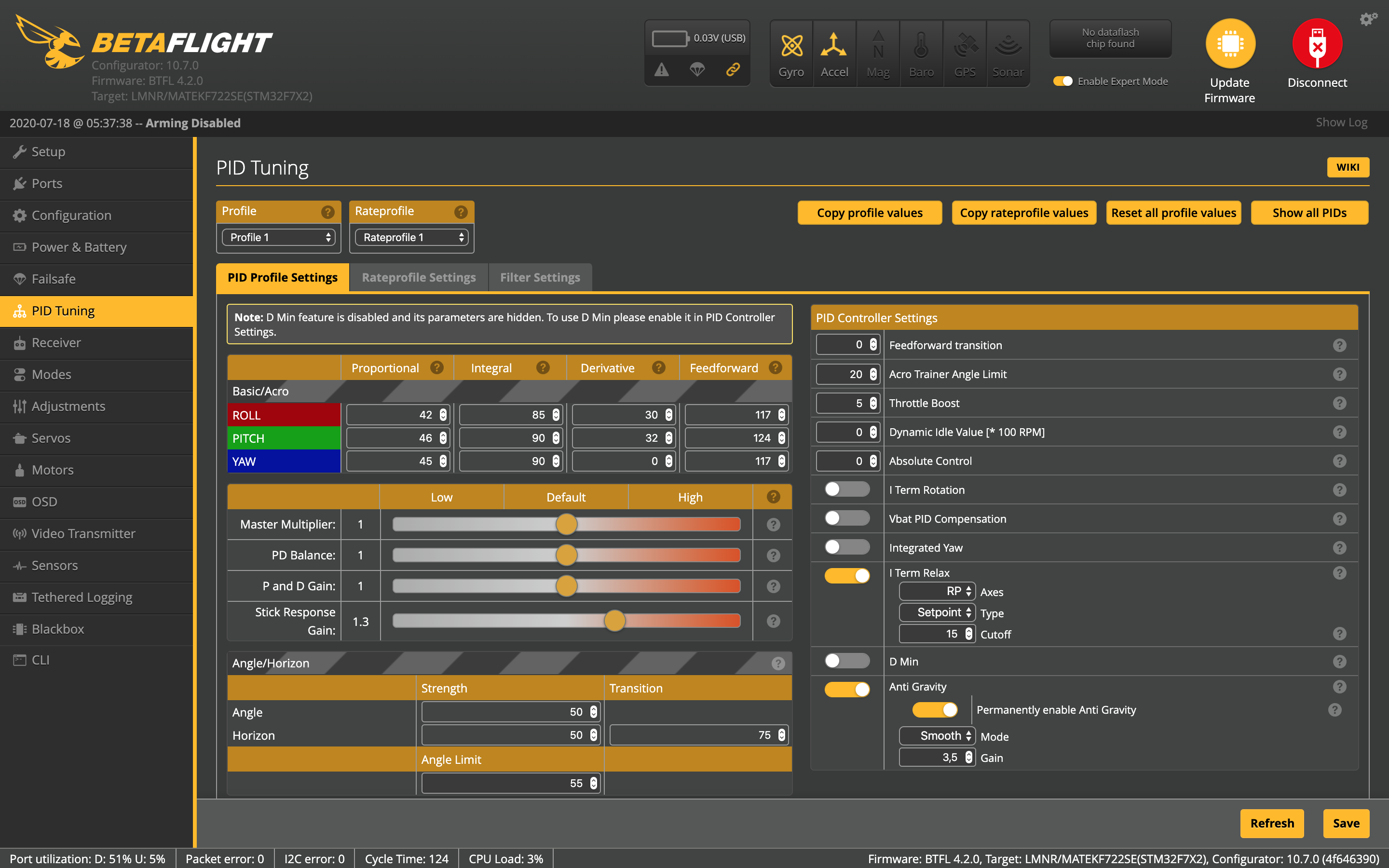
Como ejemplo de tal aumento, le mostraré los siguientes registros:
Primer gráfico - giroscopio
Segundo gráfico - PID
Tercero - motores
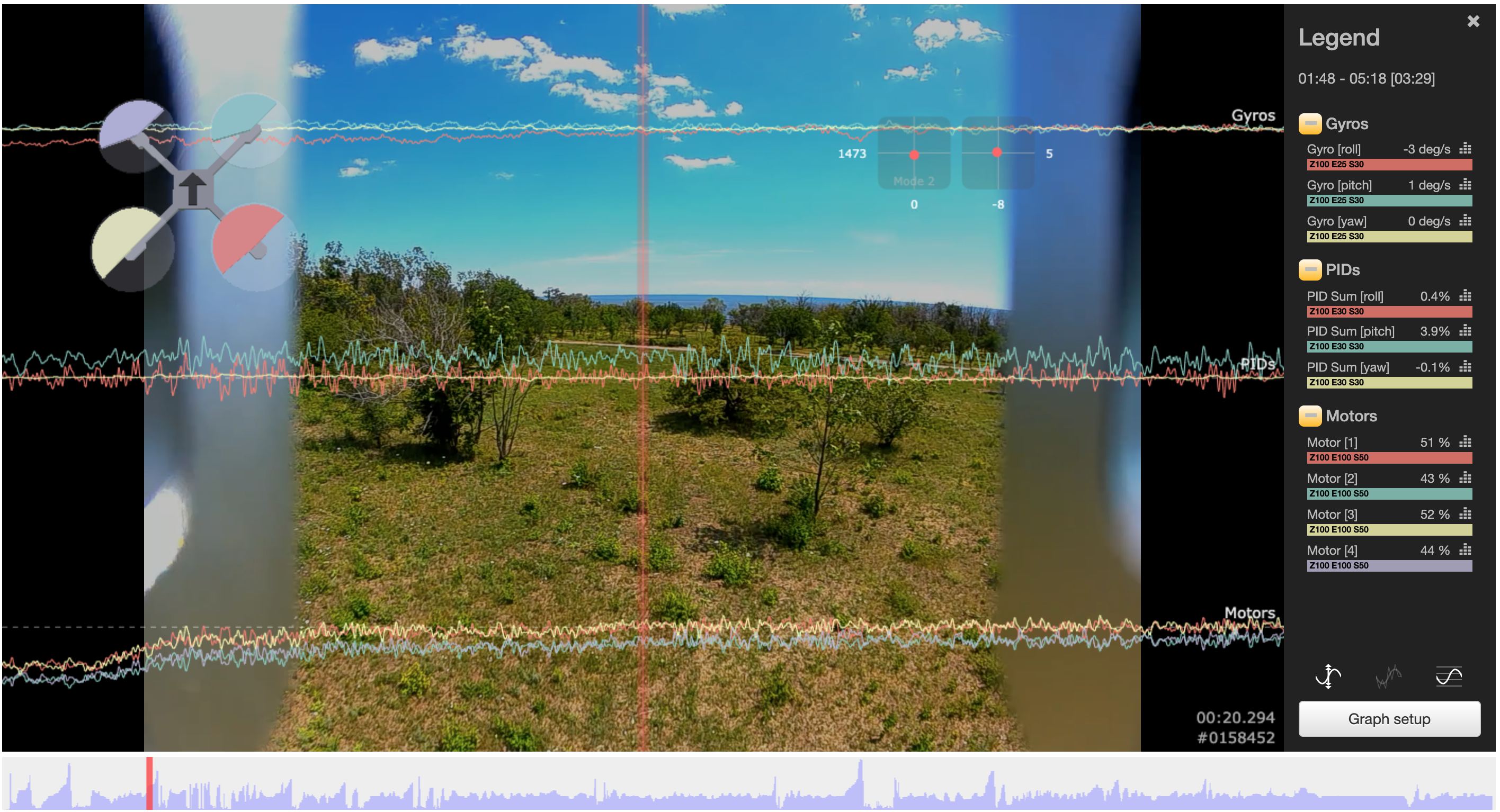
(estas son hélices normales , con un filtrado ligeramente reducido)
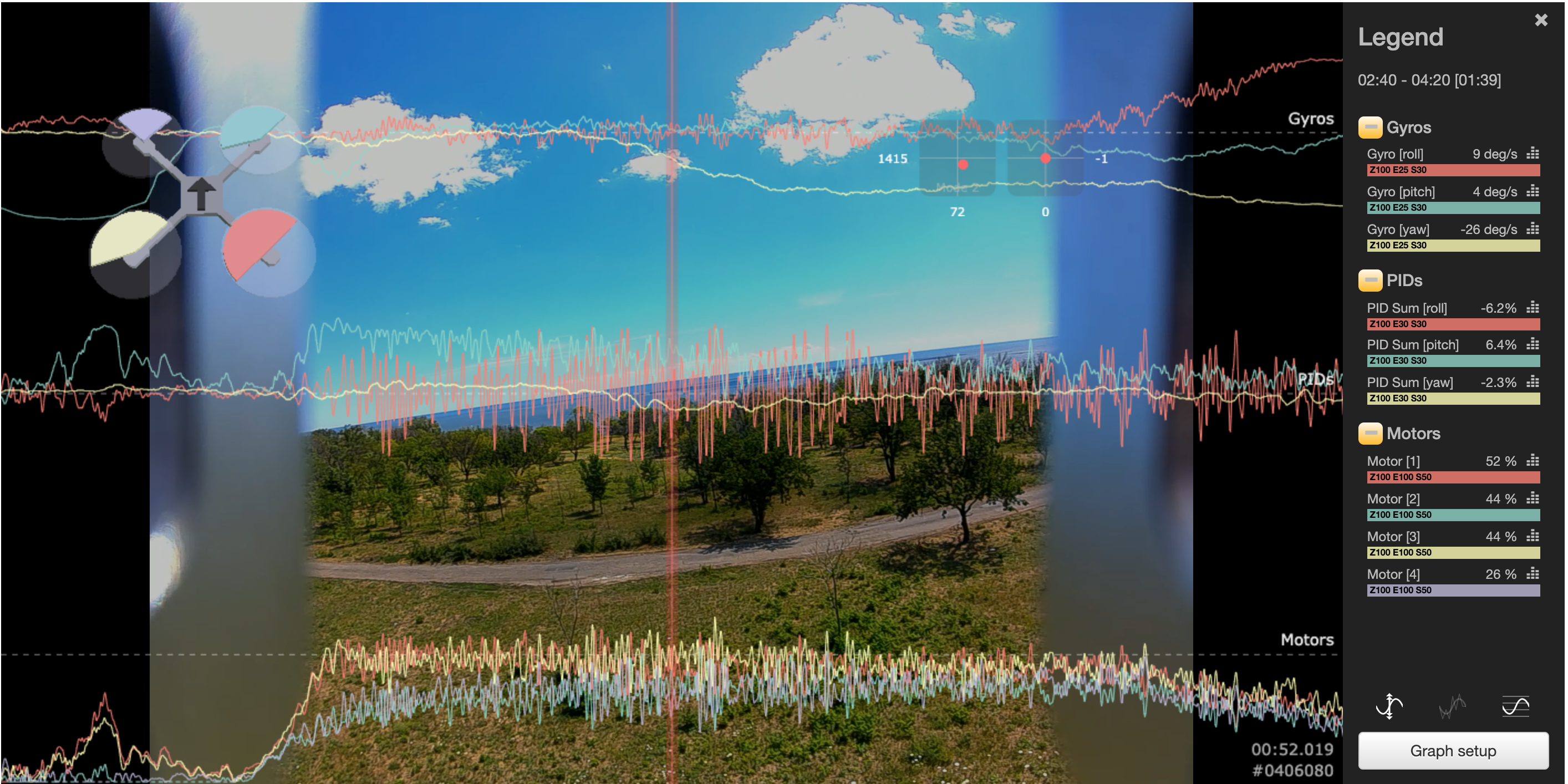
(Como puede ver, las vibraciones de las hélices defectuosas se amplifican en la etapa del controlador PID, lo que provoca un estrés excesivo en los motores, son literalmente salchichas)
Capturas de pantalla de - Blackbox Explorer .
Filtración
El proceso de filtrado consiste en eliminar el exceso de ruido de la señal del giroscopio. Pero, ¿qué cantidad de la señal del giroscopio queremos conservar y cuánto filtrar?
Honestamente, no puedo decirte en colores, pero sucedió que en el vuelo beta, el ruido, o más bien las vibraciones, se miden en Hz. 1Hz: una rotación por segundo. Esto se hace para facilitar la visualización y trabajar con estas variables. Además, la turbulencia se denomina técnicamente la "tasa de cambio de rotación", la frecuencia del cambio de rotación.
La velocidad del quadcopter está en la región de 0-30 Hz. Por encima de 30Hz a 80Hz tenemos un lavado de propulsión, cuando el quadcopter se sacude de la turbulencia en sus propias corrientes. La información en el rango de 0 - 80Hz es importante para el controlador PID, por lo que no la tocaremos.
Con PIDtoolbox puedes robar estas cartas:

Paso bajo
Filtros

Como muestra el gráfico anterior, la señal del giroscopio contiene información de 0 Hz a 1000 Hz, pero solo nos interesa el rango de 0-80 Hz, ya que este es el movimiento real del quadcopter que el controlador PID debe conocer. Por lo tanto, necesitamos una solución de filtrado para permitir que las frecuencias bajas pasen a través del controlador PID mientras atenuamos las frecuencias altas, y para eso podemos usar un filtro de paso bajo.
Los filtros de paso bajo permiten que las señales de baja frecuencia pasen y atenúen las frecuencias altas, que en su mayoría son solo ruido.
Se establece la frecuencia de corte y el controlador simplemente reduce las señales por encima de esa frecuencia. Curva de atenuaciónle permite no cortar todo debajo de uno limpio, y cuanto mayor sea la frecuencia del ruido, más se produce su atenuación, sin problemas.
Los pilotos a menudo cometen el error de establecer dicho filtro en la misma frecuencia que el ruido visible. Por ejemplo a 200Hz. Como el filtro atenúa el ruido sin problemas, la instalación de dicho filtro no dará muchos resultados. El filtro debe establecerse en frecuencias más bajas. Quizás incluso a 80Hz.
Cuanto menor sea la instalación de dicho filtro, mayor será el filtrado.
Hay una cosa simple a tener en cuenta al configurar el filtrado. Cuanto más filtrado, mayor es el retraso. Está claro que está en milisegundos y no es significativo, pero para un controlador PID es crítico. Ya que comenzará a reaccionar a los eventos más tarde, lo que significa que intentará alinear el quadcopter en el pasado :)
Filtro de muesca
Notch se traduce como una muesca, de hecho se ve así: los
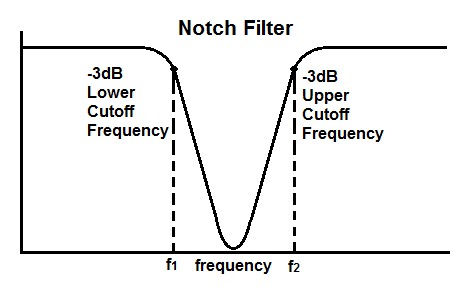
filtros arrojan algo del ruido de abajo y algo del ruido de arriba . Desde Betaflight 3.1, estos filtros son dinámicos y se ajustan a diferentes niveles de ruido.
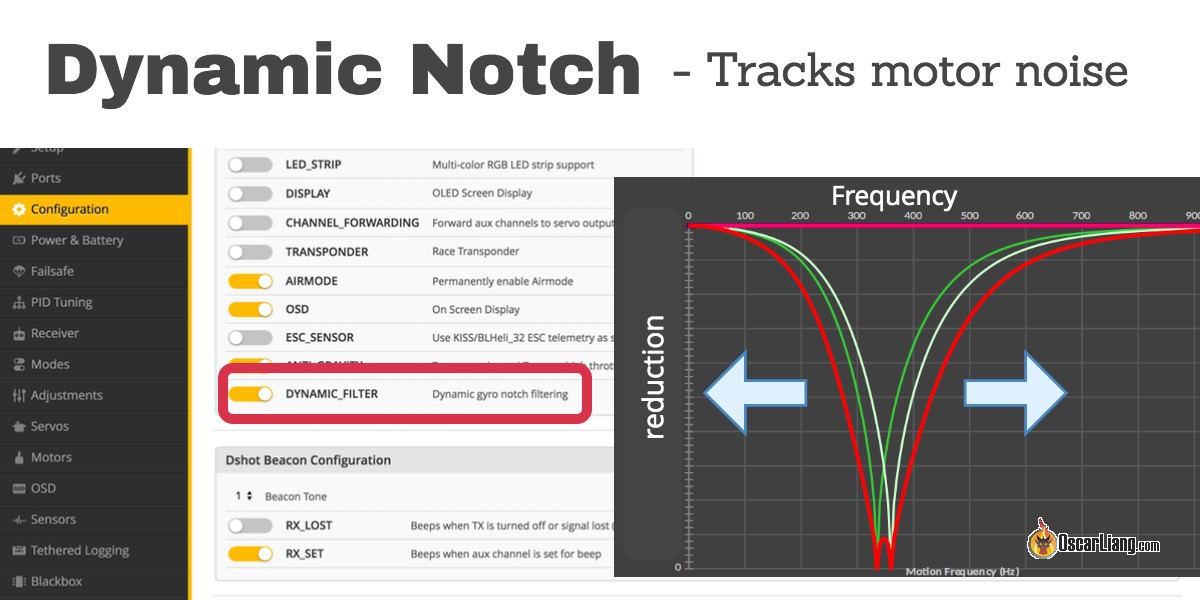
Los filtros se usan junto con los filtros de paso bajo, pero ya se usan para filtrar el ruido de los motores que se encuentran arriba.
D término de filtrado
Como se mencionó anteriormente, D puede multiplicar el ruido del giroscopio, por lo que Betaflight tiene un filtro D. A continuación, en los trastes, puede ver el nivel de ruido antes y después del filtrado.
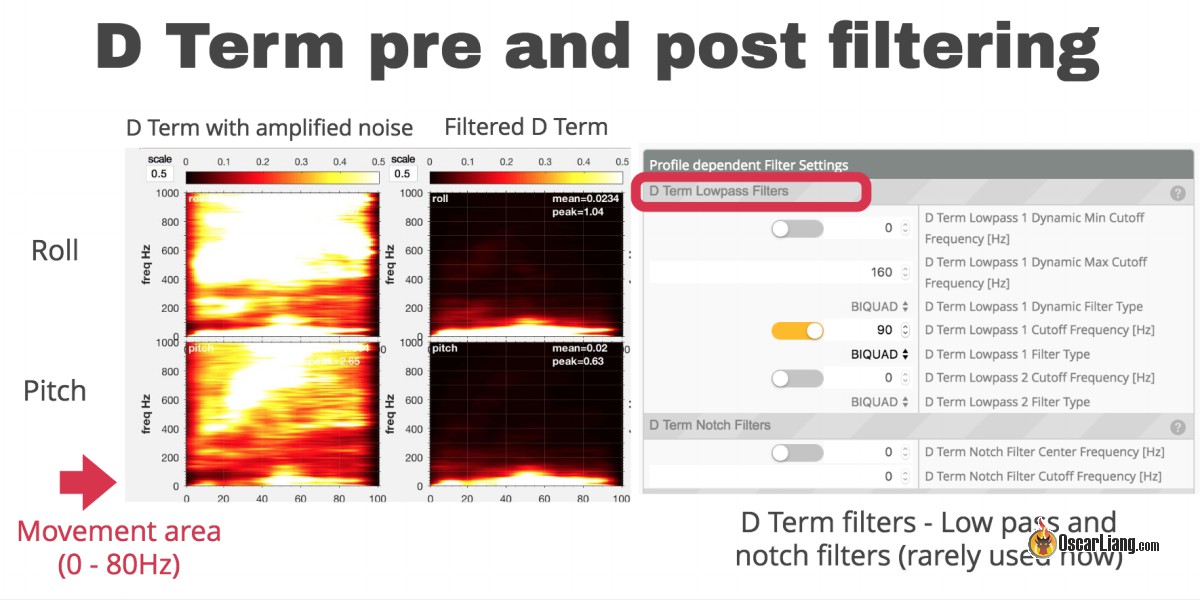
No existe una comprensión clara en la comunidad sobre si filtrar D en gran medida o no. Pero existe una regla de los motores calientes, cuanto menos filtración y mayor D, más se calientan e incluso pueden quemarse. Pero en la dirección opuesta, tenemos un retraso.
Filtro RPM
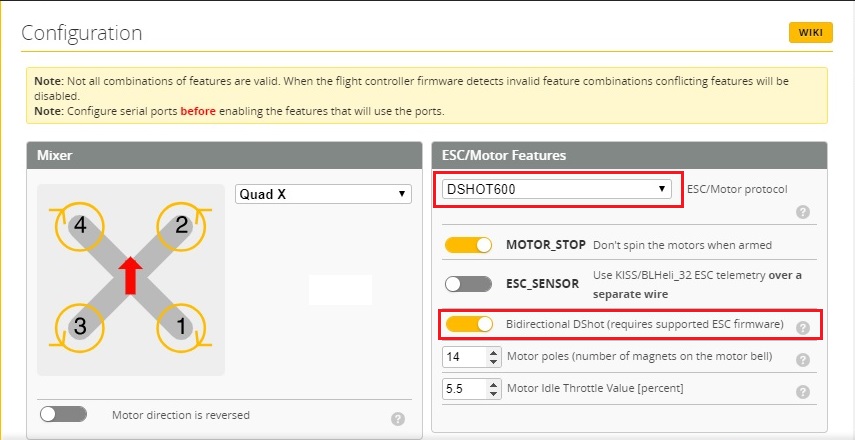
Entonces, en realidad, lo que comencé a usar nuevo es el filtrado RPM. Funciona a través de un protocolo DSHOT bidireccional que permite al controlador de vuelo conocer las RPM exactas de un motor en particular. Y en base a estos datos, se aplica el filtrado.
(Su ESC debe ser compatible con DHSOT de doble cara)
Firmware para ESC, desde 3.7
Si los motores están calientes, entonces esto es un problema. Los motores calientes pueden ser una señal de que los motores están haciendo mucho ruido y están tratando de responder a las vibraciones con tanta frecuencia que se genera calor.
Los motores pueden calentarse por varias razones, como un marco viejo, campanas dobladas en los motores, equilibrio desequilibrado, bombas adicionales en su dron.
Por supuesto, es mejor tener, como dicen, una compilación limpia, y que todo sería nuevo, pero primero puede intentar configurar el filtrado.
Para comenzar, puede comenzar aumentando el filtrado D, tomando medidas de 20 Hz. Verifique la temperatura después de cada paso y encuentre su rango óptimo.
Y debe buscarlo entre la temperatura de los motores y las vibraciones. Como se mencionó anteriormente, aunque el filtrado está diseñado para reducir la cantidad de ruido, puede imponer algunos retrasos y el controlador PID puede no seguir el ritmo. Y no importa lo divertido que sea, causar vibraciones. Pero estas vibraciones no pertenecen al lavado de propinas. Esto es solo una operación PID ineficiente.
Las versiones recientes de Betaflight tienen controles deslizantes, intente no cambiar los valores de los filtros, pero intente usar estos controles deslizantes "maestros".
En este momento tengo esas configuraciones con el filtro RPM habilitado, tal vez intentaré reducir aún más el filtrado:
