
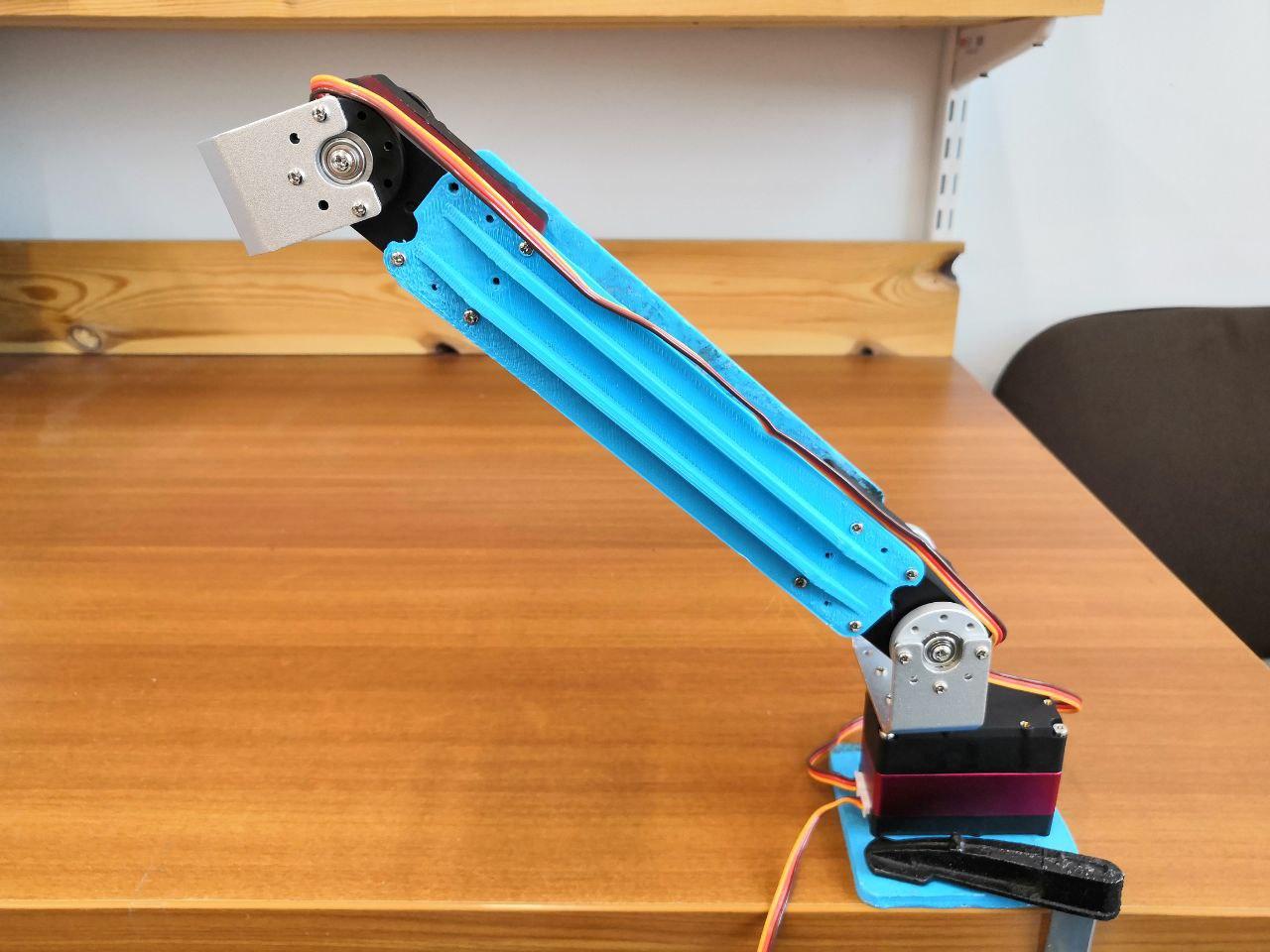
Estamos desarrollando un robot para recoger pelotas de golf . Necesitamos un servo para abrir la escotilla. Hemos probado un gran número y hoy queremos contarte sobre un Dynamixel analógico muy interesante, que es más de la mitad del precio.
Un modelo moderno de servoaccionamiento de hoy representa un dispositivo completo en una sola carcasa (motor con caja de cambios y tablero de control). La forma más común de controlar los servos modelo es el protocolo PWM, la posición del servomotor está determinada por el ancho del pulso, la presencia de pulsos sirve como una señal de encendido. Este enfoque le permite simplificar la electrónica lo más posible, pero no está exenta de problemas.
En primer lugar, no hay comentarios, y también hay problemas con la conexión a una PC con plataformas similares (generalmente se requiere un Arduino u otro microcontrolador como capa intermedia). En segundo lugar, debido a las peculiaridades del protocolo, la precisión de posicionamiento rara vez supera 1 \ 256 por rango de servo (270 o 180 grados). En tercer lugar, no se pueden detectar averías mecánicas y sobrecalentamiento. Todos estos problemas conducen al hecho de que tales servos no se pueden usar en tareas en las que se requiere controlar constantemente una gran cantidad de grados con alta precisión.
Para resolver estos problemas, debe usar un bus de datos común. Una solución completa popular son los conocidos servomotores Dynamixel. El protocolo es compatible con uart regular (se requiere un esquema de negociación simple). Se puede conectar a cualquier computadora con este puerto (Arduino, Raspberry, pc). Este enfoque le permite sincronizar los movimientos de los servoaccionamientos, recibir comentarios, supervisar el rendimiento (errores, temperaturas) y ajustar el controlador PID. El cableado también se simplifica, ahora es posible ensamblar servos en serie. El fabricante tiene una amplia gama de modelos para todos los gustos y colores. Sin embargo, el precio sigue muy por encima de los servoaccionamientos PWM convencionales.
Y luego tenemos un servoaccionamiento de producción nacional IlyushaTotalmente compatible con el protocolo Dynamixel v1. Nos preguntamos qué tipo de bestia era y qué podía hacer. Decidimos probarlo y lo que surgió lo contaremos a continuación.
Parámetros básicos
Voltaje de suministro 6-15V
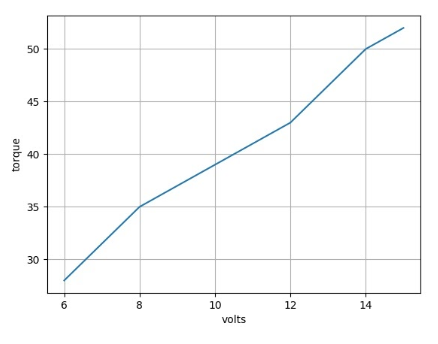
Par máximo 60kg * cm
Resolución del codificador 16384 loro 360 grados
Protección contra sobrecalentamiento
Protección de corriente
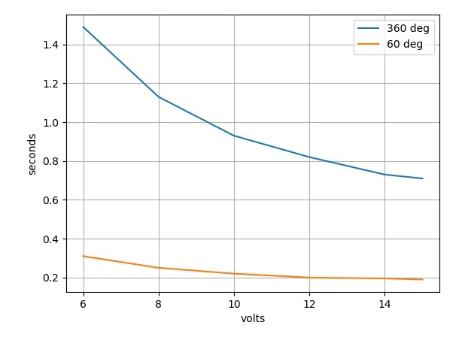
Primero, mediremos la velocidad de rotación sin carga para un rango de voltajes
6, 10, 12, 14, 15 V
Y ahora mediremos el máximo momento, a los mismos valores de voltaje:
Tiempo de transición para un movimiento de 60 grados.
Y ahora lo más desagradable es la reacción en la caja de cambios.
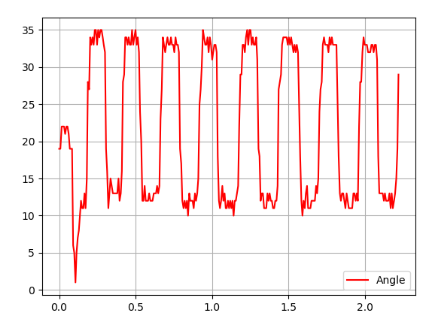
De esto podemos concluir que la reacción es ~ 0.5 grados:

Las características son adecuadas para nuestros propósitos, dado que el precio es más de dos veces menor, decidimos usar estos servos en nuestro dispositivo.