En el 51 aniversario del primer aterrizaje humano en la luna en julio de 1969, recordemos la tecnología fundamental que ayudó a hacer posible este aterrizaje: el filtro Kalman . El nombre de Rudolf Kalman, un ingeniero eléctrico estadounidense, matemático e inventor de ascendencia húngara, es una técnica matemática que propuso en 1960. Es especialmente útil para estimar la posición de los objetos con base en observaciones con múltiples sensores y es ampliamente utilizado en sistemas de guía, navegación y control para vehículos y aeronaves.
Fue durante la visita de Kalman al Centro de Investigación Ames de la NASA en Mountain View que los ingenieros de la NASA vieron que los métodos de Kalman podían resolver el problema de estimación de trayectoria no lineal para el programa Apollo. Sin embargo, ejecutar el algoritmo de filtro Kalman en una computadora de la década de 1960 no fue posible. Una nota técnica (de los archivos de la NASA, ver más abajo) ilustra el trabajo de investigación en las décadas de 1960 y 1970 que implementó un "filtro Kalman numéricamente preciso en un sistema informático con memoria limitada adecuado para aplicaciones en tiempo real como , para la navegación a bordo de aeronaves o naves espaciales ".
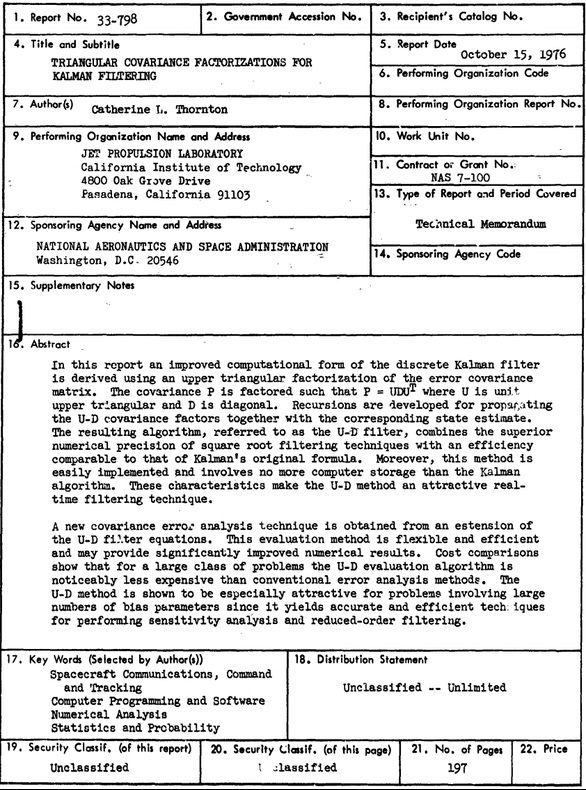
Coeficientes de covarianza de tres lados para el filtro de Kalman (archivos de la NASA)
Otro problema importante con el filtro de Kalman hace 50 años fue la falta de estabilidad computacional debido a errores de redondeo causados por la restricción de 8 bits. Se han desarrollado muchas soluciones complejas para resolver este problema.
Los esfuerzos del equipo de ingeniería continuaron y, al final, la persistencia dio sus frutos:
«» 2 , . «» . NASA . , . .
— , «».
En gran medida, tales hazañas de ingeniería hicieron que la misión lunar fuera un éxito. Cincuenta años después, el algoritmo de filtrado de Kalman se usa aquí en la Tierra en muchos campos, incluidos la robótica, los drones y los juegos de realidad virtual. Investigadores de la Universidad de Tokio utilizaron el filtro Kalman en 2014 para hacer que Roomba detectara y evitara personas con éxito. El Sistema de la Reserva Federal de los Estados Unidos utilizó el filtro Kalman para determinar las tasas de interés neutrales a largo plazo y administrar la política monetaria.
Sebastian Troon, creador del auto sin conductor en Google, enseña el tema del uso del filtro Kalman para rastrear objetos en tiempo real para crear autos sin conductor. Autoware anunció el lanzamiento de un set este mesalgoritmos de código abierto, incluido el filtro de Kalman, y este conjunto se centra en el desarrollo de una implementación de referencia de un vehículo no tripulado en el mundo real.
A lo largo de las décadas de su existencia, varias tecnologías han evolucionado juntas y alcanzado una etapa de desarrollo tal que su combinación hace que la conducción autónoma sea posible, útil y valiosa para la sociedad. Sin embargo, para pasar de la creación de prototipos a la implementación comercial, las empresas se esforzarán por estandarizar y garantizar la interoperabilidad entre componentes: hardware y algoritmos. La interacción de los componentes fomenta la competencia, y la competencia ayuda a mejorar la calidad y reducir los costos, acerca un futuro no tripulado y justifica los miles de millones de dólares gastados en investigación y desarrollo en el campo de los vehículos no tripulados.
Enlaces
:
@TeslaHackers — Tesla-, Tesla
@AutomotiveRu — ,

: