Los procesadores neuromórficos, basados en el principio de interacción de las neuronas, muestran los mejores resultados en el campo de las redes neuronales artificiales / tareas de visión artificial. Sin embargo, están lejos de imitar los procesos que ocurren en el cerebro. Una de las muchas razones son los astrocitos, las células gliales más abundantes.
Se pensaba que tenían una función de apoyo para las neuronas, pero la investigación de las últimas décadas muestra que este tipo de célula hace mucho más que llenar el espacio entre las neuronas, como los investigadores han creído durante más de un siglo. La investigación muestra que estas células también desempeñan un papel clave en las funciones cerebrales, incluido el aprendizaje y la generación de patrones centrales (GPC), que es la base de comportamientos rítmicos como respirar y caminar.
Contras de las soluciones neuromofílicas existentes
La suposición de que el aprendizaje solo ocurre con conexiones fuertes entre neuronas es incorrecta. De hecho, el aprendizaje y la memoria están óptimamente equilibrados en redes que
operan macroscópicamente al borde del caos , un modo dinámico estrecho que
se ignora en gran medida en los algoritmos de aprendizaje, pero que también se manifiesta en el cerebro.
En su mayor parte, las soluciones neuromórficas carecen de la combinación de la eficiencia computacional de un objetivo de red global con la universalidad de un mecanismo local dependiente de la actividad.
Red neural-astrocítica
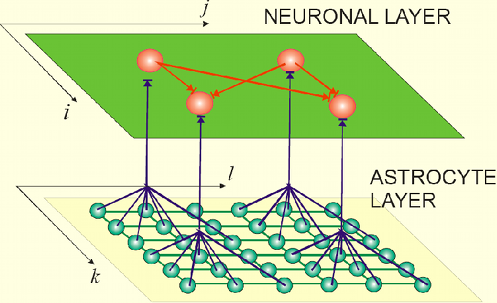
Al reconocer esta brecha en la literatura existente, los investigadores de la Universidad de Rutgers están desarrollando algoritmos cerebrales que también explican y reproducen la función de los astrocitos.
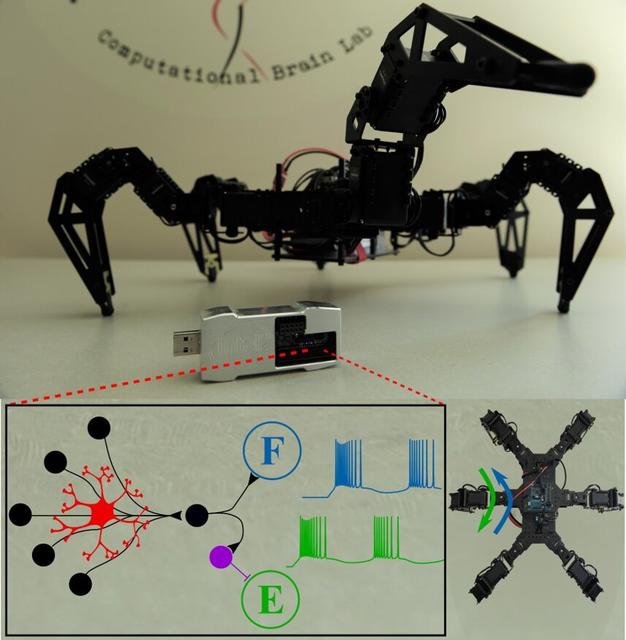
Proponen (con cautela, tautología) un controlador CPG mórfico cerebral basado en una red neural-astrocítica integral que genera dos patrones de marcha para un robot. Basado en mecanismos de neuromodulación astrocítica recientemente identificados, nos proponen una arquitectura CPG que se integra perfectamente en el chip neuromórfico Loihi de Intel utilizando un entorno de interacción en tiempo real entre el chip y el entorno del sistema operativo robótico (ROS).
El Loihi CPG se puede utilizar para controlar un robot que camina con resistencia al ruido sensorial y perfiles de velocidad variable.
Es increíblemente interesante observar el desarrollo de nuevos enfoques arquitectónicos en el campo de la imitación del trabajo del cerebro. Se están realizando investigaciones y experimentos que cambiarán enormemente nuestras vidas en el futuro. Y nuestros trabajos.