¿Por qué decidí escribir esta publicación?
Por supuesto, puedes ver las instrucciones originales para instalar ROS Noetic en ROS Wiki , pero todo está en inglés y se explica de manera muy vaga, pero intentaré explicártelo lo más claramente posible. Vamos a empezar.
¿Qué es ROS?
ROS - Robot Operating System, un marco para la programación de robots, que proporciona funcionalidad para el trabajo distribuido. ROS se desarrolló originalmente en 2007 bajo el nombre de switchyard en el Laboratorio de Inteligencia Artificial de la Universidad de Stanford.
¿Se puede instalar ROS Noetic en otras versiones de Ubuntu?
No hay una respuesta correcta a esta pregunta. Parece que los paquetes individuales de Noetic se pueden instalar en otras versiones del sistema operativo, pero su estabilidad no está garantizada. Por lo tanto, lo más probable es que no todo sea así. Así que vayamos a la instalación en sí.
¿Qué pasa si estoy usando una versión diferente de Ubuntu?
ROS se ha desarrollado en diferentes versiones que se instalan en diferentes versiones de Ubuntu.
Versión de Ubuntu |
Versión ROS |
Ubuntu 15.04 y 16.04 |
Ros kenetic |
Ubuntu 18.04 |
ROS melódico |
Ubuntu 20.04 |
ROS Noetik |
ROS Ubuntu? ! noetic , ros-noetic
, ros-melodic
.
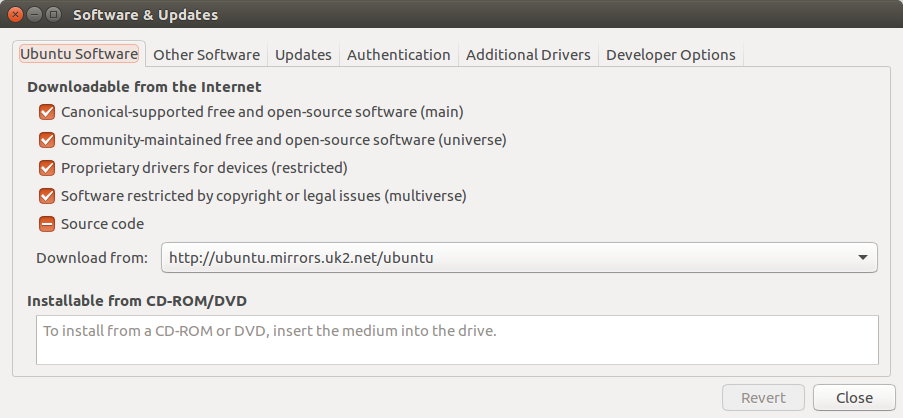
, :
Main - , Canonical.
Universe - , .
Restricted - .
Multiverse - , .
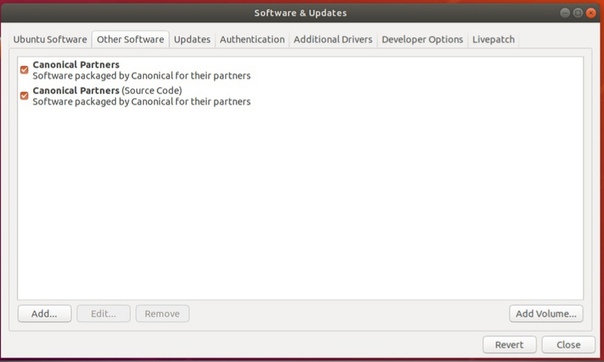
, . " Ubuntu" "Ubuntu Software" ,
"Other sowtware" Canonical Parthners Canonical Parthners(source code)
ROS
ROS Noetic
1
. packages.ros.org . :
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $ (lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list'
. :
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
curl apt-key, , -:
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
2
-
sudo apt-get update
3
. , ROS :
Desktop Full - , . , : 2D/3D . , :
sudo apt install ros-noetic-desktop-full
2. Desktop Instal - ROS, rqt rviz.
sudo apt install ros-noetic-desktop
3. ROS-Base: (Bare Bones) - ROS. , . :
sudo apt install ros-noetic-ros-base
- ROS :
sudo apt install ros-noetic-_
4
bash, ROS. :
source /opt/ros/noetic/setup.bash
5
, ROS. ROS , . , rosinstall - , ROS . :
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
6
Antes de poder utilizar muchas de las herramientas ROS, deberá inicializar rosdep . Le permite instalar fácilmente las dependencias del sistema para el código fuente que desea compilar y es necesario para ejecutar algunos de los componentes principales en ROS. Si aún no ha instalado rosdep , es hora de instalarlo. Para hacer esto, escriba en la terminal:
sudo apt python3-rosdep
Paso 7
Para inicializar rosdep, escriba en la terminal:
sudo rosdep init
Y luego escribimos lo siguiente:
rosdep update
TOTAL
Felicitaciones por instalar ROS Noetic. Ahora puede comenzar a programar sus propios robots usando ROS.