Desde 2017, he estado realizando diferentes visiones informáticas: desde detecciones y clasificaciones claras hasta lectura de labios .
Y después de una serie de accidentes, me encuentro como el único ingeniero de visión por computadora en una startup que fabrica helicópteros no tripulados. Por esta razón, decido irrumpir con mis piernas de visión por computadora y hacer un proyecto favorito relacionado con drones.
El plan es el siguiente: simplemente ensamblaré un quadric con una cámara, un piloto automático y una pieza de hierro de borde (neuronas impulsoras y otros CV), y obtendré más o menos una plataforma de vuelo universal. Por ejemplo, como este , pero más flexible y económico. Y hay muchas aplicaciones interesantes: desde detectar a una persona y seguirla, hasta controlar un cuadricóptero utilizando Reinforcement Learning .
Así comenzó mi viaje de 8 meses: desde la idea y el pedido de los primeros componentes en aliexpress hasta el uso completo de la odometría visual a bordo del quadcopter y volar a lo largo de él.
En la primera parte del artículo (¡después de un par de párrafos!) Contaré y mostraré qué componentes utilicé para montar un quadrocopter para esta tarea, en qué me guié a la hora de elegir y qué tomar en cuenta para hacerlo volar.
( !) , , GPS, visual SLAM.
,
450 ( 450).

. : . - . , tradeoff \.
,

-, . , , ¯\_(ツ)_/¯
( AliExpress) . 700KV (← ; , KV ). KV.
,
( ), , , , ( ).
: , , 10 . 10, , , , .
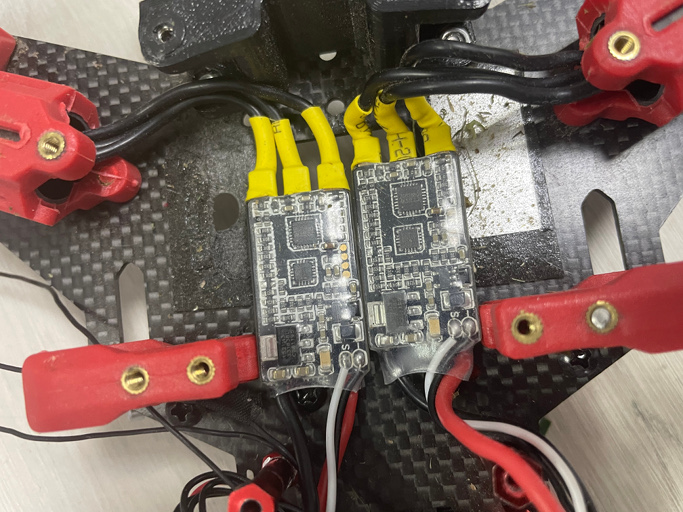
ESC. DShotXXX ( XXX, )
, software , ESC ( ArduPilot PX4, )
,
( — XXYY): ( ). . ? . .

, , : - .
, . 1145.
, . , , . - , - :)
( ): 1) ( ) 2) .
,

( "") .
: . , , . 4S Li-Po , 5000 mAh. . , ( ) 20 .
,

(\) . .. . , . ( ) FrSky (Taranis X10 lite FrSky R-XSR). , , \.
"" RadioMaster. , FrSky , .
,
software stack (state estimation, , ), hardware ( software stack ).
Hardware , ( IMU, , ).

( + GPS, , ), , .
- . .. - . open-source , ( ): ArduPilot PX4.
ardupilot ( , ) 2020- hardware - pixhawk 4 mini.
, companion computer

, . companion computer , , - path planning, external navigation, + task specific .
: Intel Movidius, Google Coral, Jetson . Raspberry c .. , "" .
Jetson-e Nano ( ) (TensorRT), GPU .. - CUDA ( CUDA, , ?), SLAM .
,
Intel RealSense D435, , RGB . Raspberry Pi c MIPI .. 3D , - , .
, , , rolling shutter .. , .
, !
, (, ) !
, , :
Getting Started. . , .
, companion computer . , .
, , . , , ( , ESC).
, .
, ( ⇒ ).
Loctite ( ), ( , ). - .
( ), , .
( GPS), .
. : , . LiPo 4.2v. , "" , ( 3.5-3.6v)
, ?
, : .
- . (), .
El resultado es un dron en el que es muy aburrido volar en modo manual, y si vuela, solo en la calle, es grande para uso en interiores. Pero DimDrone servirá como una excelente plataforma para probar e investigar diferentes algoritmos de visión por computadora.