
Hace varios años, científicos de la Universidad Ben-Gurion crearon un robot compacto: Rising STAR (RSTAR). Ahora tiene un socio con un diseño similar: Big STAR (BSTAR), pero el tamaño del nuevo robot es 6 veces mayor. Se espera que el tándem aumente la productividad, mejore la versatilidad de los robots y los haga menos vulnerables. RSTAR y BSTAR se utilizarán en operaciones de búsqueda y rescate cuando se requiera movimiento en terrenos accidentados y todo terreno.
Los robots STAR fueron creados por el científico David Zarrouk y sus colegas de la Universidad Ben-Gurion. En sus primeros diseños, Zarruk prestó la máxima atención a la autonomía de las estructuras. Las primeras versiones de STAR resultaron ser bastante autónomas y maniobrables. Los robots se transforman fácilmente en función de las condiciones ambientales. Entonces, RSTAR tiene rotores, puede volar alrededor de obstáculos. Además, el robot tiene tanques de natación inflables. Al ver que el diseño fue exitoso, el equipo de desarrollo decidió ir más allá. Como resultado, RSTAR tiene un hermano mayor: BSTAR.
Características de BIG STAR
El robot BSTAR tiene las siguientes características:
- velocidad de movimiento de la estructura de hasta 1,4 m / s;
- carga útil del robot> 5 kg;
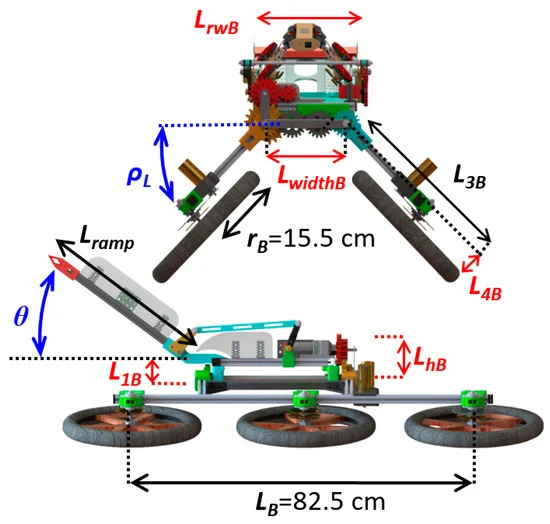
- longitud de la estructura desde el eje de la rueda trasera hasta el eje de la rueda delantera - 82,5 cm;
- "cola" retráctil para llevar RSTAR;
- estructura deslizante;
- altura mínima plegada - 21 cm;
- 2 baterías de polímero de litio con una capacidad de 5200 mAh;
- peso - 9,8 kg.
El robot es capaz de moverse por terrenos accidentados. Se espera que la sinergia entre BSTAR y RSTAR aumente sus capacidades de navegación y franqueamiento de obstáculos. Además, un robot grande puede servir como cargador para un pequeño RSTAR.
robot BSTAR es adecuado para transportar un gran volumen de carga útil: baterías, cámaras, equipos de comunicaciones y otros sensores para operaciones de búsqueda y rescate.
El robot está controlado por un controlador Arduino Uno y dos controladores RobotClaw ECS.
La primera estrella israelí

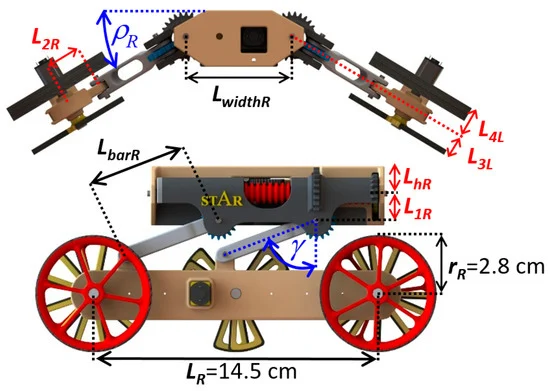
robot multifuncional RSTAR apareció en 2018. Debido al cambio de diseño adaptativo, puede moverse en superficies horizontales y verticales, así como gatear o andar sobre ruedas. El robot se adapta rápidamente a las condiciones externas: puede cambiar el ángulo entre los marcos de las ruedas, moverlos paralelos al cuerpo hacia adelante y hacia atrás.
Además, RSTAR puede cambiar el centro de gravedad. Puede pasar sobre un obstáculo que es demasiado alto para él, y luego mover el centro y superarlo de manera segura.
Debido a que el robot tiene el mecanismo de extensión con cuatro varillas, puede ensanchar la distancia entre el cuerpo y las piernas y moverse entre las paredes.
Para aumentar la movilidad, el robot puede equiparse con ruedas o soportes con radios. Puede correr boca abajo y, con la ayuda del paso de un caracol, gatear sobre obstáculos que son más grandes que el diámetro de sus ruedas.
El robot está equipado con una batería LiPO de 800 mAh, pero hay planes para hacerlo más autónomo. La altura mínima del robot maniobrable es de 3,5 cm, por lo que puede navegar por lugares muy estrechos y difíciles de alcanzar. La velocidad máxima del robot es de hasta 0,8 m / s. Peso de construcción: 0,38 kg.
Unión de dos estrellas
Por un lado, el BSTAR y el RSTAR tienen diseños similares, solo realizados en una escala de 6 a 1. Sin embargo, debido al gran tamaño del BSTAR, algunas de sus partes tuvieron que ser reemplazadas .
BSTAR usa un marco de metal, mientras que RSTAR usa uno de plástico.
Un nuevo e importante elemento de diseño del robot es su "cola" retráctil, una plataforma móvil en la parte trasera. La plataforma puede cambiar el ángulo de inclinación en las direcciones negativa y positiva. El propósito principal de la "cola" es llevar el diminuto RSTAR. Un total de 3 "niños robóticos" pueden caber en el sitio principal.
El sitio se puede utilizar en varios casos para maniobras adicionales. Por ejemplo, RSTAR, al ingresar al sitio BSTAR, puede inspeccionar obstáculos desde una altura.
Como se mencionó anteriormente, el bebé se carga con la batería de su "familiar".
Según lo previsto, la colaboración de dos robots multifuncionales debería incrementar significativamente su productividad, versatilidad, incrementar la velocidad de exploración del terreno y ampliar el rango de operaciones posibles.
