En la ciencia ficción, especialmente en los clásicos de los escritores estadounidenses de mediados de siglo, los robots son muy comunes. La mayoría de las veces ayudan a una persona, a veces viven solos y, a veces, incluso pelean con las personas que los crearon. Pero casi siempre, estas son máquinas antropomórficas verticales, con dos piernas y dos brazos. Es sorprendente la insistencia con que los escritores y guionistas de películas tratan de dotar a las máquinas de rasgos humanos.
Los robots modernos son mucho más prácticos, están adaptados al máximo para cualquier tarea limitada y se ven tan diferentes a los humanos como sea posible.
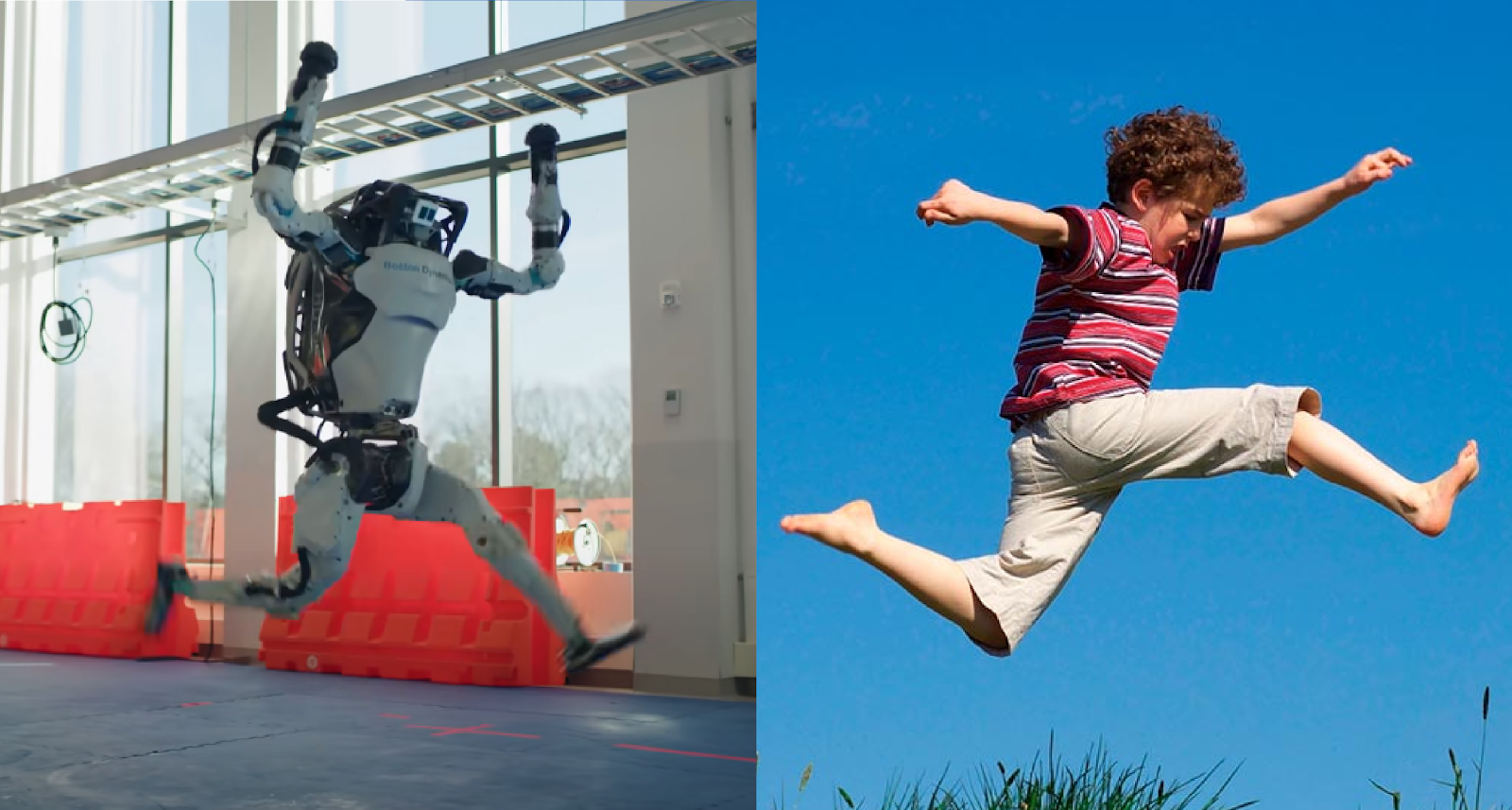
Pero hay una empresa que, a pesar de todas las consideraciones de practicidad, crea robots que son lo más similares posible a los humanos y animales: Boston Dynamics. ¡Y recientemente le enseñaron a bailar a su robot!
Vea este video debajo del corte.
A pesar de todas las dificultades y numerosas reventas de la empresa en diferentes manos, BD no se desanima. Tiene planes ambiciosos. La investigación científica va de la mano con la actividad comercial, como lo demuestra un video incendiario que literalmente hizo estallar Internet hace un par de semanas, en la víspera de Año Nuevo. Por el momento, tiene más de 25 millones de visitas y su popularidad no ha disminuido.
No se trata de gráficos por computadora, el video está hecho con robots reales que realmente hacen exactamente lo que se ve en la pantalla. Los dos primeros minutos se filmaron en un solo fotograma, sin pegar ni editar. Incluso el séquito se elige especialmente para enfatizar el máximo realismo. Esta no es una escena glamorosa o cromática. Esta es una sala de pruebas de laboratorio sin adornos, detrás del vidrio del cual se pueden ver algunas máquinas y mecanismos, lugares de trabajo ordinarios, marcas en el piso para un camarógrafo.
Movimientos elegantes, saltos altos, acciones sincronizadas: todo esto demuestra perfectamente las capacidades de la robótica moderna. ¿Cómo logró Boston Dynamics (BD) este éxito? En este artículo, les ofrezco un recorrido rápido por la historia de la empresa, sus éxitos y fracasos, y también un poco sobre cómo se filmó este baile de robots.
Cuando era niño, leí una historia de ciencia ficción en la que un ingeniero creaba robots autorreplicantes y de autoaprendizaje, y comenzaron una pequeña guerra entre ellos, luchando por recursos de alta tecnología para una actualización. En esta historia, recuerdo un detalle: el primer robot, habiendo ganado la independencia, reemplazó el práctico motor antigravedad por patas primitivas, como la de su creador. El ingeniero se opuso categóricamente, pero el robot no escuchó sus argumentos. Posteriormente, este le jugó una broma cruel al robot: tropezó durante la batalla y fue aplastado por sus familiares, lo que no habría sucedido si hubiera dejado el antigrav.
Casi todos los robots modernos, sobre ruedas o sobre orugas, son simples y confiables. No hay problemas con el equilibrio, la operación se limita a menudo a habitaciones con piso plano.

Los robots del almacén de Amazon
BD decidieron hacer realidad un sueño de ciencia ficción:

Robot Atlas
Cómo todo empezó
La evolución de humanos y animales ha demostrado claramente cuán universales son las extremidades. Con su ayuda, puede caminar, correr, escalar las laderas de las montañas y los troncos de los árboles, subir escaleras. Los primates han llegado más lejos en esta versatilidad.
Durante mucho tiempo, a los ingenieros no se les dio una postura erguida. Los giroscopios eran demasiado voluminosos, no se podían crear análogos de un aparato vestibular compacto con retroalimentación debido a la base técnica electrónica primitiva. Pero la llegada de microcontroladores asequibles ha hecho realidad el sueño de estos ingenieros. De todos los colectivos involucrados en robots andantes, Boston Dynamics es el más conocido.
La inspiración y líder permanente de este laboratorio es Mark Reibert .

Mark Reibert
En 1973 se graduó de la Boston Northeastern University con un título en Ingeniería Eléctrica, y en 1979 recibió una beca para desarrollar la primera Máquina de Saltar, del famoso científico e inventor estadounidense Ivan Sutherland .
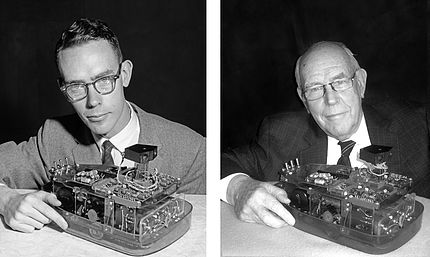
Ivan Sutherland
En 1980, logró interesar a DARPA (entonces todavía ARPA)en su desarrollo , recibió los primeros fondos de ellos y abrió el Laboratorio de Piernas. Originalmente estaba ubicado en la Universidad Carnegie Mellon, donde Mark trabajó como profesor, y luego, después de él, se mudó al Instituto de Tecnología de Massachusetts.
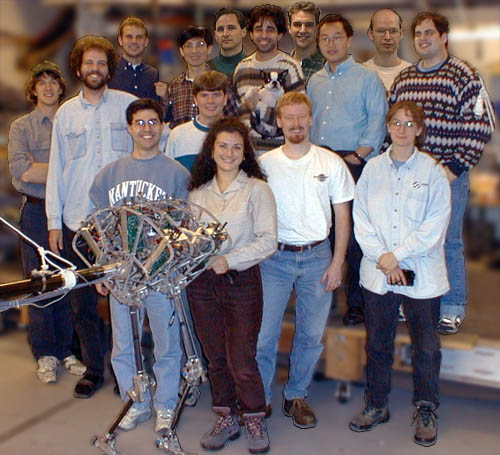
Leg Laboratory
El sitio web de MTI todavía tiene una página de este equipo de investigación, creado mucho antes de las tendencias modernas de diseño y desarrollo web. La web1 cálida y con forma de tubo parece bastante conmovedora. Recomiendo encarecidamente seguir el enlace y ver dónde comenzó la historia de este famoso equipo científico.
En 1983, su desarrollo estaba listo con el nombre de "3D One-Leg Hopper":

El saltador de una pierna podría mantener el equilibrio o moverse saltando en una dirección determinada y mantener el equilibrio si intentaba dejarlo caer. Se eligió un método de movimiento inusual porque es más fácil calcular el equilibrio en una pierna.
En el siguiente video, puedes ver los robots creados en el Laboratorio de Piernas. Todos ellos son mecanismos puramente de investigación, sin ningún valor práctico, creados exclusivamente para el estudio del trabajo de las articulaciones, impulsiones sobre un principio de funcionamiento diferente y algoritmos matemáticos de movimiento. Algunos forman parte de diseños más complejos. Algunos de ellos no son capaces de mantener el equilibrio por sí mismos y se mueven con la ayuda de una barra con contrapeso. Los robots "desnudos" recuerdan la película sobre Terminator y los interiores del laboratorio: el taller de Jaime y Adam de "Mythbusters"
Mark expresó su experiencia de investigación acumulada en su libro Legged Robots That Balance , publicado en 1986.
Del laboratorio a la empresa. Trabaja para los militares
El tiempo no se detiene. Para obtener una mayor independencia financiera, Mark decide dejar la Universidad en 1995. Finalmente se marcha a su propia empresa, fundada en 1992. El nombre de esta empresa ahora es escuchado incluso por aquellos que no están interesados en la tecnología moderna, gracias a videos espectaculares que muestran los logros de la robótica moderna: Boston Dynamics .
Como al principio de su carrera, Mark recibe financiación del ejército. DARPA le da a su empresa la tarea de desarrollar una "mula de trabajo" que pueda transportar cargas importantes en áreas donde los vehículos convencionales no pueden pasar. Según el TK, el robot debe ser capaz de trepar, superar una pendiente importante, superar arbustos, pasar por superficies resbaladizas y sueltas, es decir, poder hacer todo lo que un soldado de infantería o ... una mula es capaz de hacer.
Completar esta tarea no fue fácil. Solo en 2005 se introdujo el modelo BigDog .

El proyecto fue extremadamente ambicioso. Fue el primer plan de este tipo que se desarrolló y su éxito mediático superó todas las expectativas. Se podían escuchar noticias sobre el robot en todos los hierros y muchos videos recibieron reproducciones récord.
Hasta ahora, los modelos más conocidos de robots andantes eran productos puramente entretenidos a la hora de moverse, torpes y torpes. Cayeron por el menor impacto y solo pudieron moverse sobre un piso perfectamente plano. Pero BigDog parecía una máquina del futuro, versátil y práctica. La gente estaba hipnotizada por el espectáculo de un mecanismo autónomo que caminaba como un ser vivo y capaz de llevar una carga significativa. La creación de la compañía de Mark se correspondía plenamente con la leyenda del legendario Arthur Clarke: "Cualquier tecnología lo suficientemente avanzada es indistinguible de la magia". Incluso llegó al punto de que la gente filmó parodias de esta criatura mecánica:
Desafortunadamente, el robot técnicamente no tuvo tanto éxito como sugiere el video. Incluso la segunda generación, lanzada en 2008, tenía demasiados defectos. En 2013, el Departamento de Defensa de Estados Unidos se negó a continuar con este programa. Uno de los principales problemas fue el ruido fuerte y desenmascarador del motor de combustión interna, del que los ingenieros no pudieron deshacerse. El segundo problema fue que, a pesar de la implementación formal del encargo técnico, las características del robot aún eran insuficientes para participar plenamente en misiones de combate reales. La pasabilidad era impresionante, pero los militares carecían de ella. La autonomía era de solo 30 km, el robot recorrió esta distancia a la velocidad de un peatón. Dado que el robot era técnicamente extremadamente complejo, los prototipos tenían serios problemas de confiabilidad.Las primeras versiones apenas resistieron media hora de trabajo continuo antes de que algo se rompiera en el mecanismo y se volviera incapaz de seguir funcionando. Los últimos modelos de robots funcionaron con confianza hasta tres horas, pero esto sigue siendo extremadamente pequeño y es casi imposible reparar un dispositivo tan complejo en el campo. La avería pondría en peligro cualquier operación de combate real si tuviera grandes esperanzas para este asistente. Además, el robot era muy caro de fabricar.La avería pondría en peligro cualquier operación de combate real si tuviera grandes esperanzas para este asistente. Además, el robot era muy caro de fabricar.La avería pondría en peligro cualquier operación de combate real si tuviera grandes esperanzas para este asistente. Además, el robot era muy caro de fabricar.
Sin embargo, aunque se abandonó el desarrollo de este modelo, los militares no dejaron de trabajar con BD. A medida que la investigación continúa, se han lanzado varias variedades más de robots para caminar, correr, incluso saltar y gatear.

En el pedestal se encuentra Little Dog (hermano eléctrico menor de BigDog), Spot, BigDog, WildCat, LS3 (hermano militar mayor de BigDog)

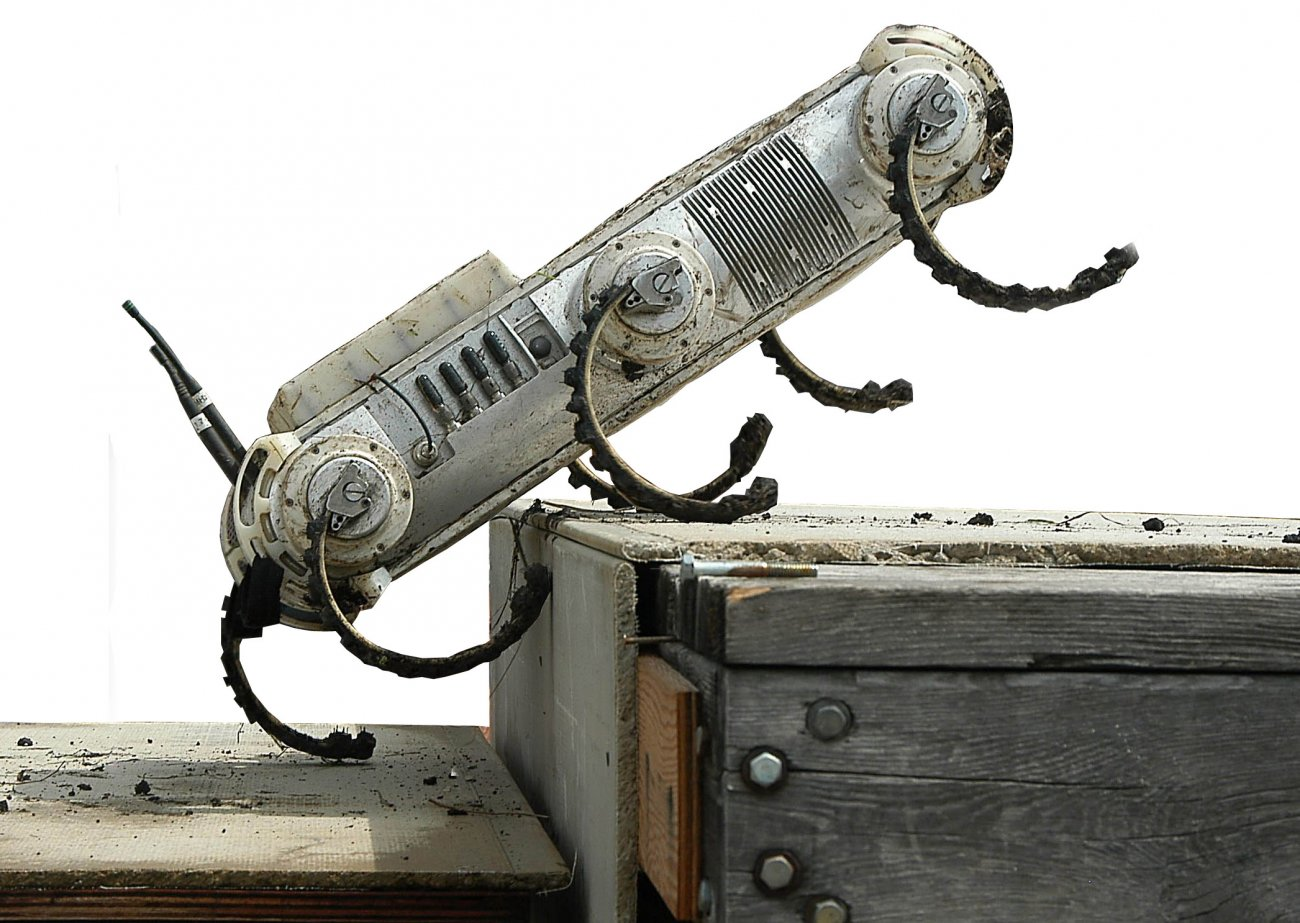
SANDFLEA - Pulga.
Un bebé robot (15 cm de altura) capaz de saltar más de dos metros con una lata de gas comprimido.
RHEX.
Aproximadamente del tamaño de SANDFLEA, puede escalar pequeños obstáculos y gatear incluso en terrenos pantanosos.
Preguntas financieras
Trabajando con los militares, la compañía cambió de manos varias veces. A finales de 2013, Google compró la empresa. Es difícil decir por qué lo hicieron. Quizás solo en el proceso de comprar diferentes compañías junto con varias otras compañías de robótica y nuevas empresas, quizás en busca de carteras de patentes y dependiendo de las ganancias. Durante la colaboración, BD y Google no pudieron encontrar un lenguaje común. Después de que Google dejó a Andy Rubin, quien inició la transacción, se suspendió el futuro de la empresa. El propio Andy dijo que estaba decepcionado con la velocidad del desarrollo, porque incluso la investigación preliminar llevó mucho tiempo. El gigante de Internet no quiso invertir tanto dinero en una empresa cuyos resultados comerciales tienen que esperar 10 años o más. Además, el departamento de publicidad de Google no le gustó el video del último robot humanoide empujado y derribado.
(En 1.22, el robot es empujado con un palo y "selecciona" la caja, en 2.04 es derribado con un empujón en la espalda)
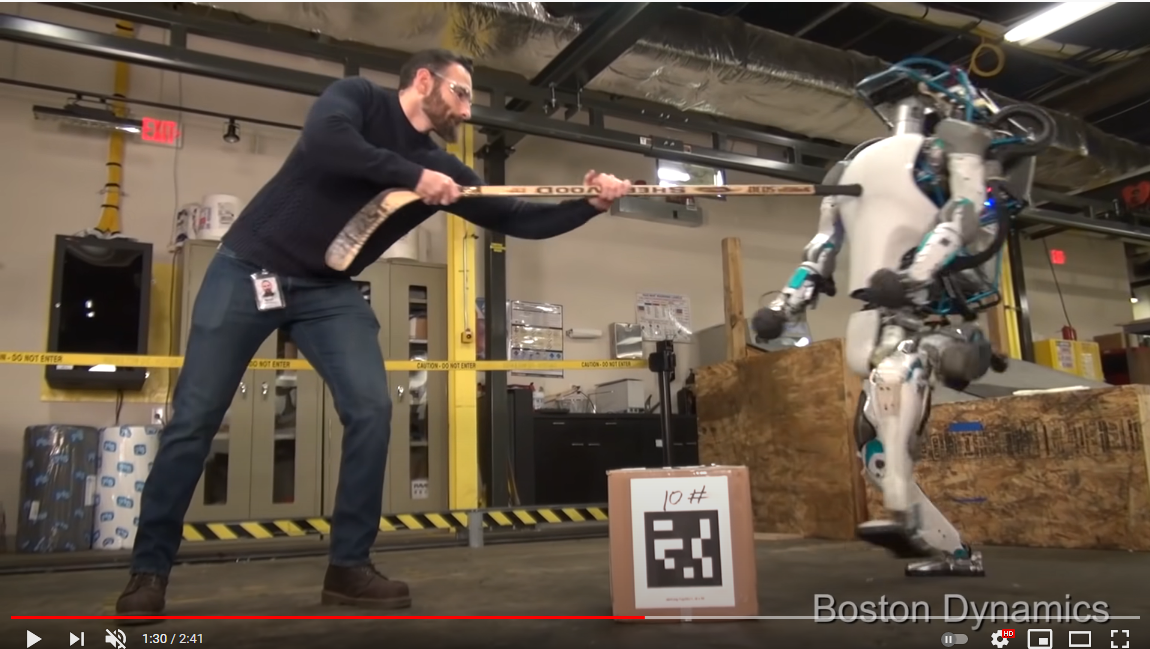
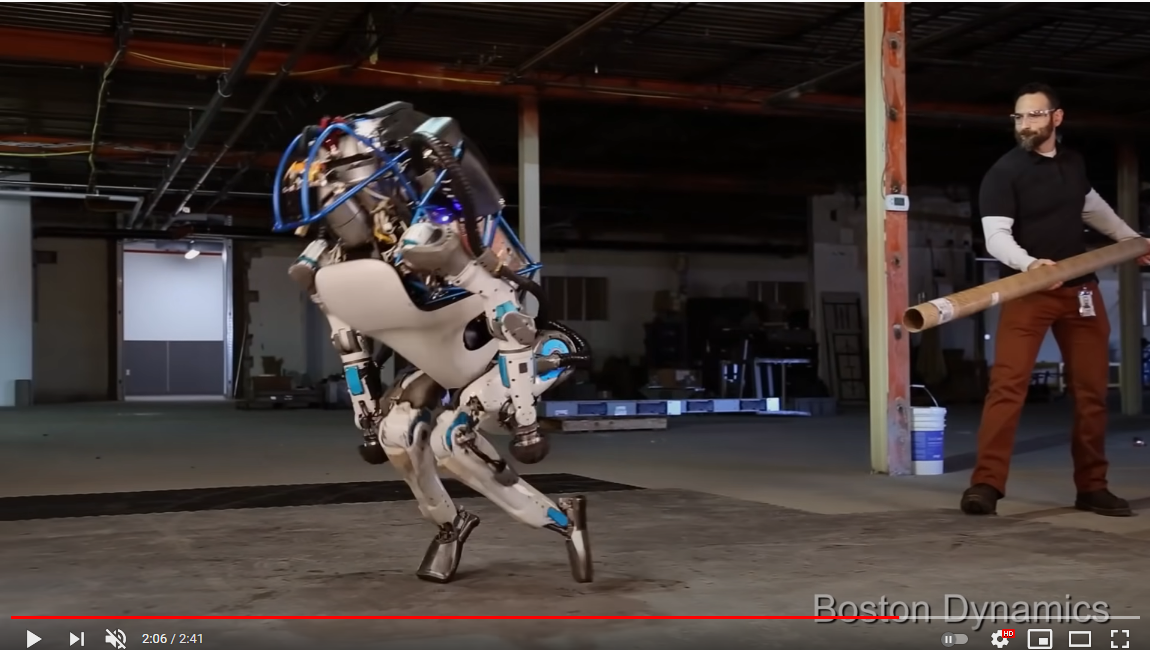
Además, la naturaleza antropomórfica del robot despertó una asombrosa empatía entre la audiencia, que vio en la demostración de los algoritmos de equilibrio: burla y simpatía por el robot.
Una carta escrita por la jefa del departamento de relaciones públicas de Google Courtney Hone subió a Internet , en la que escribe que los robots humanoides molestan a la gente por el hecho de que los ven como una amenaza, como si estos robots fueran capaces de quitarles el trabajo. Finalmente, en 2016, Google decide vender BD. Según los rumores, Amazon y Toyota querían comprar la empresa. Como resultado, pasó al holding japonés Softbank.
Las aventuras financieras de BD no terminaron ahí. Más recientemente, se supo que la empresa está nuevamente a la venta. En diciembre del año pasado, Softbank y Hyundai acordaron una modesta suma de alrededor de mil millones de dólares.
Sin embargo, todo esto no impidió el desarrollo de nuevos robots. Además de Atlas, que se burló con un garrote, se desarrolló un robot con un modo de movimiento híbrido: el Handle. Las patas del robot terminan con ruedas que le permiten moverse rápidamente sobre una superficie plana, bajar escaleras. Incluso puede saltar si es necesario.
Primer modelo comercial
Más recientemente, se abrió una sección con tienda en el sitio web de la compañía , y BD, por primera vez en casi 30 años, ofrece un modelo comercial: Spot. A pesar del nombre del perro (Spot - una mota), el robot se ofrece para uso comercial en instalaciones industriales y no está diseñado para uso doméstico. Las modestas dimensiones (el robot es algo más grande que el Pastor Alemán), sugieren modestas posibilidades: solo una hora y media en modo activo, mientras que la batería se carga durante dos horas.

El diseño se hizo muy bien. El robot ya no se parece al Terminator y se mueve con bastante gracia, sus extremidades no hacen cinta de correr, como en versiones anteriores de robots de cuatro patas. Precio base - $ 75,000. Es difícil decir si esto es mucho o poco, porque tales ofertas en el mercado se pueden contar con los dedos de una mano. A pesar de la pandemia y la recesión general, la empresa dice que ha producido unos 400 robots de este modelo y no se va a detener ahí.
Danza
Después de recordar la historia de la empresa y considerar algunos modelos de robots, se puede hablar un poco sobre cómo se creó la danza incendiaria. Para ello, preparé una versión resumida de una entrevista con Aaron Saunders , vicepresidente de ingeniería de Boston Dynamics, tomada de él por la revista IEEE Spectrum, publicada por el Instituto Americano de Ingenieros Eléctricos y Electrónicos .
El sencillo de rock'n'roll que aparece en el video fue grabado por The Contours en 1962. La canción "Do You Love Me" es una de sus obras más famosas. La coreógrafa fue Monica Thomas de MAD KING THOMAS .
Hasta ahora, los robots e ingenieros de BD nunca habían hecho algo así. La gama de movimientos disponibles incluye muchos elementos de caminar, correr y saltar, algunos ejercicios de gimnasia e incluso parkour. Pero nadie ha tratado de hacer bailar los mecanismos todavía. Inicialmente, la danza se creó utilizando un programa de simulación por computadora, en el que los movimientos de danza humana se adaptaron a las capacidades físicas de los robots. Después de seleccionar un movimiento en particular, se mostró la simulación a los ingenieros. Miraron la pantalla y dijeron algo como: "¡Será fácil!", O: "¡Será difícil!", O: "¡Esto me asusta!" Mientras trabajábamos en el proyecto, se desarrolló un conjunto de herramientas con la ayuda de las cuales se programaron los movimientos de ballet de los robots a un alto nivel. Por lo tanto, el baile que se muestra en el video no es un guión,donde todos los detalles más pequeños se registran manualmente, este es el producto de una tubería de software que combina elementos desarrollados por separado y los transforma en una matriz de datos, que luego se cargan en la máquina.
Lo más difícil fue programar los movimientos de rotación, porque son más diferentes a los elementos que se utilizan al correr y saltar. Sin embargo, la destreza y el equilibrio necesarios para realizar los movimientos ya practicados resultaron ser suficientes para programar el baile. Antes de este experimento, el énfasis principal estaba en el movimiento de las piernas, saltar y correr. En este caso, la parte inferior del cuerpo de los robots es la más utilizada. El siguiente paso para aumentar la complejidad de los patrones de comportamiento es desarrollar movimientos de baile, utilizando las manos para empujar o tirar. Uno de los nuevos desafíos para el equipo fue expandir la movilidad con la parte superior del cuerpo del robot.
Los Atlas no utilizan controladores de aprendizaje automático, pero utilizan lo que la empresa llama control reflexivo (controladores predictivos que trabajan con modelos predictivos que tienen en cuenta la dinámica y el equilibrio, optimizando la trayectoria en los modos online y offline).
Este experimento reveló mucho sobre la confiabilidad de los robots y sus capacidades. El robot comercial Spot, a diferencia de los modelos Atlas puramente de investigación, fue diseñado para un funcionamiento continuo. Mostró excelentes resultados y pudo bailar todo el día sin apenas mantenimiento. Solo se han realizado unas pocas copias de los atlas; no están destinados a un funcionamiento prolongado y continuo. En este sentido, se parecen más a un helicóptero, que tiene más tiempos de preparación y mantenimiento que tiempos de vuelo. Un lugar se parece más a un automóvil que conduce más de lo que sirve.
Los atlas tuvieron que ser modificados especialmente para este programa, aumentando su potencia. Aunque los trucos y saltos que demuestran estos robots son muy afilados, los movimientos de baile requieren aún más velocidad y fuerza.
Es difícil decir cómo se desarrollará la empresa. El propio Mark ya no es joven, tiene 71 años. Google no pudo encontrar potencial comercial en BD. Cuando Softbank compró la empresa, no se reveló el monto del acuerdo, por lo que es difícil decir si la venta de BD al gigante automotriz coreano fue rentable o no. Parece que no se observaron éxitos comerciales especiales durante el tiempo que la empresa tuvo con Softbank. Hyundai espera utilizar la empresa para desarrollar pilotos automáticos en sus coches y automatizar la producción. Quizás pueda obtener beneficios prácticos de la alianza con BD.
El caso es que Mark y sus colegas son científicos, con mayúscula. Investigan en su forma más pura, sin pensar en monetizar sus conocimientos. El conocimiento teórico adquirido durante treinta años es enorme. Es muy difícil decir si encontrarán una aplicación práctica en un futuro próximo. Aunque parezca que se trata de una investigación en ingeniería aplicada, trabajos sobre los que no se han reivindicado durante siglos, que están lejos de la física teórica y las matemáticas superiores, tienen mucho en común. Por ejemplo, una de las principales restricciones es la nutrición. Guepardo robot experimental ni siquiera se pensó en un uso independiente. Era un banco de pruebas para el robo de tecnología, que no funcionaba sin una conexión permanente a la toma de corriente. Para Big Dog, el principal problema era el motor de combustión interna, para la autonomía de Pyatnyshka (solo una hora y media, incluso sin tener en cuenta los accesorios), y la velocidad como un peatón.
Tal vez el uso del aprendizaje automático en los controladores dé lugar a otro avance técnico, tal vez inventen fuentes de alimentación más espaciosas y compactas. El futuro de la empresa es difícil de predecir. ¡Deseémosles buena suerte!

