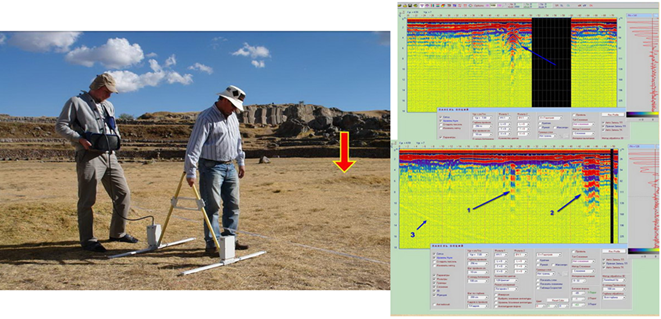
Hace unos 10 años, me encontré con una serie de estudios en los que se utilizó un dispositivo que podía ver lo que había bajo tierra: un georadar. Durante una semana no pude separarme, vi una gran cantidad de materiales de video, recuerdo el nombre del dispositivo utilizado por los investigadores: LOZA GPR. A continuación se muestra un ejemplo de un estudio de Sacsayhuamana (Perú), donde se encontraron criptas subterráneas, fosas, una losa tendida a una profundidad, y también se puede suponer que alguna vez se llenó un fondo en forma de cuenco.
Mi primer pensamiento fue: “¡Guau, eso es genial! Así que puedes encontrar muchas cosas interesantes bajo tierra. ¡Y no hay otra manera! " Este fue el comienzo de mi interés en este dispositivo. Rápidamente quedó claro que costaba un par de millones de rublos, es decir, no todos pueden pagarlo. Empecé a pensar en cómo podría hacer yo mismo un dispositivo así.
De la información en Internet, tuve una idea de cómo funciona el dispositivo. Hay un transmisor y un receptor. El transmisor envía un pulso electromagnético de nanosegundos muy potente, de varias decenas de kilovoltios, a las profundidades de la tierra.
En aquellos lugares donde cambia la constante dieléctrica del medio, es decir, el tipo de suelo, su humedad cambia, o una inclusión extraña, una cavidad de aire, parte de esta señal se refleja. Otra parte de la señal va más allá, más profunda y se refleja en alguna capa u objeto siguiente.
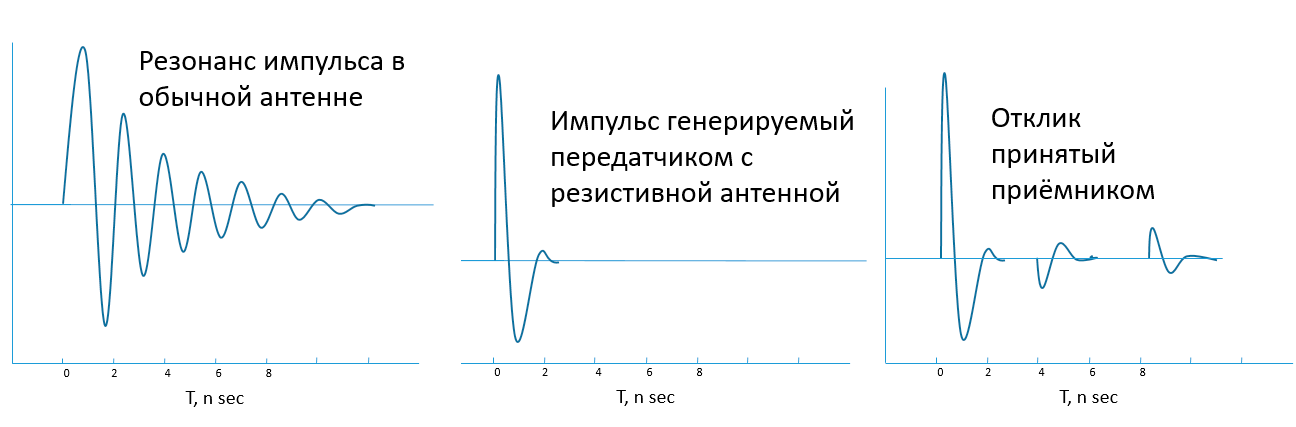
 Varias fuentes han enfatizado que las denominadas antenas resistivas (resistivas) se utilizan en GPR. Estas son antenas especiales que no tienen "timbre", no resuenan. Una antena convencional (Fig. 1) resuena (comienza a ser forzada a vibrar) a su propia frecuencia operativa. Sus propias oscilaciones no le permiten percibir cualitativamente las señales útiles que llegan en este momento. Los pulsos enviados por la antena resistiva se diferencian del pulso de radio clásico por la ausencia de una frecuencia portadora: se obtienen pulsos cortos asimétricos (Fig. 2). Si un pulso se refleja en un medio con una constante dieléctrica más alta, entonces se invierte (Fig. 3). Comencé a descubrir cómo hacer tales antenas.
Varias fuentes han enfatizado que las denominadas antenas resistivas (resistivas) se utilizan en GPR. Estas son antenas especiales que no tienen "timbre", no resuenan. Una antena convencional (Fig. 1) resuena (comienza a ser forzada a vibrar) a su propia frecuencia operativa. Sus propias oscilaciones no le permiten percibir cualitativamente las señales útiles que llegan en este momento. Los pulsos enviados por la antena resistiva se diferencian del pulso de radio clásico por la ausencia de una frecuencia portadora: se obtienen pulsos cortos asimétricos (Fig. 2). Si un pulso se refleja en un medio con una constante dieléctrica más alta, entonces se invierte (Fig. 3). Comencé a descubrir cómo hacer tales antenas.
El dispositivo en sí también prometía inversiones: “Este dispositivo es muy caro, porque es probable que haya costosos ADC de ultra alta velocidad, que permiten medir la amplitud de la señal con mucha rapidez y precisión; esto ya es de varios miles de dólares; por no hablar de un potente procesador ”, pensé.
Imagine que potentes pulsos de 10 kilovoltios de 1 nanosegundo de duración se suceden, rebotando repetidamente. La tarea principal es digitalizar rápidamente toda la información que llega al Receptor (convertir de una señal analógica a "comprensible" en electrónica, símbolos posibles para su procesamiento posterior - ceros y unos), analizar y registrar. Y estos son gigabytes de ceros y unos por segundo en un flujo continuo.
“Estoy implementando este dispositivo en comparadores para empezar. Puros centavos y múltiples reducciones de precio ”- decidí. Un comparador es un circuito electrónico muy básico cuyo único propósito es comparar dos señales analógicas entrantes. Emite 0 o 1 en la salida, dependiendo de cuál de los dos voltajes entrantes sea mayor. Es decir, un comparador es un convertidor de analógico a digital (ADC) de 1 bit que le permite grabar una forma de onda binaria. Sin embargo, para reconstruir la amplitud completa de un solo pulso de retorno a tierra, se necesitan cientos de tales comparaciones con diferentes umbrales de comparación. Mi solución súper económica no podía presumir de velocidad y eficiencia.
En general, reflexioné lentamente sobre los enfoques para la implementación del dispositivo hasta que conocí a Vladimir Zubov y comencé a realizar ingeniería inversa en el secuenciador de ADN, sobre el cual publiqué más tarde un artículo en habr.com . Todo este tiempo seguí con interés la investigación de GPR, pero no hubo tiempo suficiente para todo. Imagine mi sorpresa cuando una cadena de eventos aleatorios me llevó al mismo punto desde un lado completamente diferente.
 Hace tres o cuatro años me mudé a vivir cerca de Troitsk. En ese momento publiqué
un artículo sobre el secuenciador, estaba sentado allí ordenando los mensajes entrantes. El propio
Jonathan Rothbergme ofreció una puesta en marcha, pero algo salió mal, hubo muchos otros mensajes entrantes que consumían mucho tiempo; en general, estaba completamente inmerso en las consecuencias de la publicación. No muy lejos de nuestra casa en el campo había antenas enormes en mástiles (bueno, muy saludables), a menudo íbamos allí con un cuadricóptero. Me interesé en ellos, comencé a buscar en Google "antenas grandes, Troitsk", encontré el sitio
rk3b.ru con el nombre intrigante "Centro de Comunicación Espacial Escolar", llamé allí y pedí visitar - el propio radioaficionado.
Hace tres o cuatro años me mudé a vivir cerca de Troitsk. En ese momento publiqué
un artículo sobre el secuenciador, estaba sentado allí ordenando los mensajes entrantes. El propio
Jonathan Rothbergme ofreció una puesta en marcha, pero algo salió mal, hubo muchos otros mensajes entrantes que consumían mucho tiempo; en general, estaba completamente inmerso en las consecuencias de la publicación. No muy lejos de nuestra casa en el campo había antenas enormes en mástiles (bueno, muy saludables), a menudo íbamos allí con un cuadricóptero. Me interesé en ellos, comencé a buscar en Google "antenas grandes, Troitsk", encontré el sitio
rk3b.ru con el nombre intrigante "Centro de Comunicación Espacial Escolar", llamé allí y pedí visitar - el propio radioaficionado.
 Fue así como conocí a Alexander Nikolaevich Zaitsev, la persona más honrada que dirigió este Centro. Resultó que durante muchos años había estado estudiando la magnetosfera de la Tierra en IZMIRAN y al mismo tiempo conocía a toda la élite científica de Troitsk. Hablamos, mencioné, entre otras cosas, sobre mi interés en GPR. Alexander Nikolaevich, a su vez, me habló de las antenas en el campo. Resultó ser puramente aficionado: el conocido radioaficionado V.N.Komarov, siendo al mismo tiempo un exitoso empresario, reunió un equipo de entusiastas de la comunicación de HF, con su propio dinero creó un supercentro y antenas tales que se convirtieron en los mejores en el aire. Así lo confirman los primeros puestos en las competiciones del Campeonato del Mundo de HF.
Fue así como conocí a Alexander Nikolaevich Zaitsev, la persona más honrada que dirigió este Centro. Resultó que durante muchos años había estado estudiando la magnetosfera de la Tierra en IZMIRAN y al mismo tiempo conocía a toda la élite científica de Troitsk. Hablamos, mencioné, entre otras cosas, sobre mi interés en GPR. Alexander Nikolaevich, a su vez, me habló de las antenas en el campo. Resultó ser puramente aficionado: el conocido radioaficionado V.N.Komarov, siendo al mismo tiempo un exitoso empresario, reunió un equipo de entusiastas de la comunicación de HF, con su propio dinero creó un supercentro y antenas tales que se convirtieron en los mejores en el aire. Así lo confirman los primeros puestos en las competiciones del Campeonato del Mundo de HF.
Y después de un tiempo A. Zaitsev me presentó a personas de VNIISMI Company LLC, quienes (¡sorpresa! :) estaban comprometidos con LOZA GPR. Me reuní con P. Morozov y A. Berkut, quienes lo dirigían. Me aceptaron con mucho gusto y nos llevamos bien de muchas maneras. Imagínense mi asombro cuando dijeron que su dispositivo, el LOZA GPR, vendido a un precio de $ 25,000 en la configuración básica, funciona en comparadores. Y solo soñaron durante mucho tiempo con hacer un dispositivo en un convertidor de analógico a digital (ADC), lo que permitiría que el dispositivo funcionara rápidamente. Y que los intentos fueron diferentes, pero que no se vieron coronados por el éxito. En general, expresaron su pleno interés en el desarrollo.
Posteriormente, recibí información completa sobre cómo funciona el georadar LOZA. Realmente no había nada más que comparadores y algunos microcircuitos, el mejor de los cuales, sin embargo, fue el más avanzado en la familia FPGA hace 20 años. La principal queja de VNIISMI sobre su dispositivo quedó clara: estaba cansado de presionar el botón con el dedo. Después de todo, qué es el trabajo en los comparadores: para una medición (medición en un punto), se deben enviar 128 pulsos secuencialmente al suelo, lo que demora de segundos a 2 minutos, dependiendo del transmisor. Es decir, el dispositivo funciona según el principio: presionó el botón, se paró y esperó, movió el dispositivo 10 cm más a lo largo de la cinta métrica (la cinta métrica está realmente extendida en el suelo para moverse en incrementos de 10 cm), y así sucesivamente. ¿Puedes imaginar la velocidad de tal trabajo? Por cierto, la unidad de control o la computadora está conectada al transmisor con un cable,por lo tanto, se requiere un mínimo de 2 personas para filmar: el que mueve el georadar y el operador que lo sigue por un cable.
 También tuve la oportunidad de estudiar varios radares de penetración de tierra diferentes: dispositivos en serie y prototipos de diferentes fabricantes y desarrolladores.
También tuve la oportunidad de estudiar varios radares de penetración de tierra diferentes: dispositivos en serie y prototipos de diferentes fabricantes y desarrolladores.
Por ejemplo, esta caja grande y pesada pesa aproximadamente 5 kilogramos; en el interior hay un ADC para 1800 megamuestras por segundo, cada placa en una caja separada y con una pantalla separada, como resultado, mucho peso extra y grandes dimensiones, lo que hizo que el prototipo fuera imposible de usar en principio; no funcionó.
Otro prototipo tuvo más éxito, pero el problema fue que llevó mucho tiempo configurarlo; a veces no se encendía, se estrellaba. En general, uno de los problemas con GPR es la necesidad de operar en un rango dinámico muy grande. El impulso que se envía bajo tierra, a medida que lo atraviesa, decae muy rápidamente. Para ver tanto la primera respuesta de este pulso como la respuesta que vino desde lo profundo del suelo, necesita amplificadores y ADC que puedan recibir y distinguir tanto señales muy fuertes como muy, muy débiles. Esta amplitud se llama rango dinámico. En este prototipo, se utilizó un amplificador de dos canales para esto: un canal de amplificador funcionaba con señales fuertes y el otro con señales débiles. Es decir, había 2 canales de digitalización, que, por cierto, no se podían unir de ninguna manera. Al ajustar la ganancia,el dispositivo se pudo sintonizar a cierta profundidad y en él vio algo. Pero no más alto, no más bajo que un nivel dado, no lo vio hasta que lo reconfigure con otros parámetros. Además, el prototipo tenía una sensibilidad muy alta a las interferencias.

Entonces, comencé a diseñar mi propio dispositivo potente y de alta velocidad. El trabajo fue enorme, pero había buenas noticias: parte del trabajo ya estaba hecho - como base tomé la electrónica que (¡bang! .. :) desarrollé para el secuenciador de ADN.
El trabajo en el GPR y el paquete de software duró aproximadamente un año. Logré no solo la automatización completa, altas velocidades, la capacidad de controlar el GPR desde cualquier dispositivo, logré crear, de hecho, un núcleo universal para cualquier proyecto de alta tecnología: sistema en un módulo (Zturn) → sistema en cristal Zynq → FPGA + CPU + Linux + Django + WebSockets + Javascript ... Aunque dejaré la intriga. Para no cansar al lector, estoy publicando la parte técnica en un artículo aparte.
 El dispositivo que he desarrollado consta de 2 dispositivos: un transmisor y un receptor, cada uno con su propia antena. Ahora las dimensiones de los dispositivos son 22,2 x 14,6 x 5,5 cm, en el próximo lote se planea reducir aún más las dimensiones. Para la investigación a poca profundidad, se utilizan antenas de medidor estándar. Dependiendo de la longitud y potencia de las antenas, la profundidad de sondeo en suelos favorables puede alcanzar varios cientos de metros. Para mover el GPR, se puede usar un portador de mano, una plataforma con ruedas, antenas de detección profunda plegables / flexibles con asientos para el receptor y el transmisor; para especial Las tareas se pueden crear mediante otros medios de movimiento (por ejemplo, inflable, para el estudio de objetos submarinos).
El dispositivo que he desarrollado consta de 2 dispositivos: un transmisor y un receptor, cada uno con su propia antena. Ahora las dimensiones de los dispositivos son 22,2 x 14,6 x 5,5 cm, en el próximo lote se planea reducir aún más las dimensiones. Para la investigación a poca profundidad, se utilizan antenas de medidor estándar. Dependiendo de la longitud y potencia de las antenas, la profundidad de sondeo en suelos favorables puede alcanzar varios cientos de metros. Para mover el GPR, se puede usar un portador de mano, una plataforma con ruedas, antenas de detección profunda plegables / flexibles con asientos para el receptor y el transmisor; para especial Las tareas se pueden crear mediante otros medios de movimiento (por ejemplo, inflable, para el estudio de objetos submarinos).
Se puede conectar una plataforma con un georadar a un vehículo, el georadar es capaz de realizar levantamientos automáticos a velocidades de hasta 40 km / h (lo que probamos probablemente sea más). El movimiento del dispositivo se registra mediante un sensor de rueda y GPS. Todos los procesos están automatizados, el dispositivo es fácil de operar, no requiere un operador adicional y una persona puede manejar el disparo. Prioridades: potencia, compacidad, ligereza, enfriamiento pasivo, posibilidad de completar con diferentes medios de movimiento y antenas de diferente potencia. Estas dos pequeñas cajas pueden convertirse en el corazón de un complejo GPR de cualquier potencia. Más aburrido, especificación:
• Rango de frecuencia (MHz) 1-300
• 1000 ( 36 / 1 )
• : ,
• 5
• 1
• : 1GSPS (1)
• 16
•
• 120
• ( ) 16000
•
• 64
• : , ( ), GPS,
• wifi . web , PC
• 4 , (+12 )
•
• 222 146 55 mm ( 2)
• 100Mhz (1,5), 200MHz (1). 10MHz (10), 25Mhz (6), 50Mhz (3) ( , ). – . , / . , , 500 .

El georadar está listo para funcionar inmediatamente - después de presionar el botón "ON", el georadar comenzará a inspeccionar y escribir todo en la memoria interna. Puede funcionar de forma completamente autónoma, sin necesidad de conectar un operador.
El dispositivo distribuye wi-fi, puede conectarse a él desde cualquier computadora, tableta, teléfono a través de un navegador web. Se le lleva a un programa que le permite controlar el dispositivo, cambiar la configuración, ver la pista actual. La línea superior de la interfaz contiene varios estados que permiten comprender lo que está sucediendo en este momento: voltaje de la batería, temperatura en el procesador, tiempo, tiempo de funcionamiento, datos GPS. A continuación se muestran pestañas y botones para configurar disparadores, compensaciones, escala logarítmica, zoom y modos de funcionamiento.
El dispositivo puede realizar una medición presionando un botón, o por tiempo, por ejemplo, cada 0.3 segundos, o las mediciones se pueden sincronizar con el funcionamiento de la rueda, por ejemplo, se activa cada cuarto de revolución de la rueda, es decir, el Transmisor envía un pulso y el Receptor lo recibe y escribe. Este último modo es muy conveniente, ya que le permite unir la plataforma con el GPR a la máquina, por ejemplo, y realizar mediciones uniformes independientemente de la velocidad de movimiento.
 El primer lanzamiento se llevó a cabo junto con representantes de VNIISMI en una carretera asfaltada en construcción en el suroeste de Moscú. Así es como se veía la instalación de mi dispositivo: 2 antenas en la plataforma lo más cerca posible del suelo, la caja blanca es el Transmisor, la negra es el Receptor.
El primer lanzamiento se llevó a cabo junto con representantes de VNIISMI en una carretera asfaltada en construcción en el suroeste de Moscú. Así es como se veía la instalación de mi dispositivo: 2 antenas en la plataforma lo más cerca posible del suelo, la caja blanca es el Transmisor, la negra es el Receptor.
 Se eligió de antemano un lugar donde las comunicaciones se encuentran en diferentes puntos subterráneos. El plan era determinar esos puntos primero con el dispositivo Loza y luego mirar el mismo lugar con mi dispositivo. Mientras VNIISMI estaba ajustando mi dispositivo, di media vuelta y monté, y vi todo. Aquí está la primera imagen de mi dispositivo. Nos acercamos a los trabajadores que estaban construyendo una carretera allí en ese momento y verificamos los resultados de nuestras encuestas con los mapas de comunicación que tenían, todo coincidía, realmente había tuberías plásticas de 200 de diámetro a 2 m de profundidad, fue un éxito.
Se eligió de antemano un lugar donde las comunicaciones se encuentran en diferentes puntos subterráneos. El plan era determinar esos puntos primero con el dispositivo Loza y luego mirar el mismo lugar con mi dispositivo. Mientras VNIISMI estaba ajustando mi dispositivo, di media vuelta y monté, y vi todo. Aquí está la primera imagen de mi dispositivo. Nos acercamos a los trabajadores que estaban construyendo una carretera allí en ese momento y verificamos los resultados de nuestras encuestas con los mapas de comunicación que tenían, todo coincidía, realmente había tuberías plásticas de 200 de diámetro a 2 m de profundidad, fue un éxito.

La siguiente imagen muestra una parte del mismo metraje de una carretera en construcción. A la derecha, verá una barra que se mueve: es un oscilograma de pulso. El pequeño pico en la parte superior es el pulso generado por el transmisor, y todo lo que está debajo es lo que llega al receptor desde todas las direcciones, pero principalmente desde el subsuelo. La imagen en color grande junto al oscilograma de pulsos es un conjunto de tales columnas, es decir, cada columna de píxeles es 1 pulso, solo que aquí la amplitud se convierte en color. La barra roja en la parte superior de la imagen en color está al nivel del suelo. Además, el impulso va al suelo, y abajo vemos todo lo que se refleja y voló hacia el Receptor. Las pequeñas protuberancias azul-rojas justo debajo de la segunda franja roja son las intersecciones de los patrones de antena con objetos de tubería en forma de puntos. Es decir, en aquellos lugares donde, en la dirección de movimiento del dispositivo, cruzamos tuberías,los tubos dan una imagen de radio de este tipo, y en algunos lugares puede ver dos tubos si hace zoom.
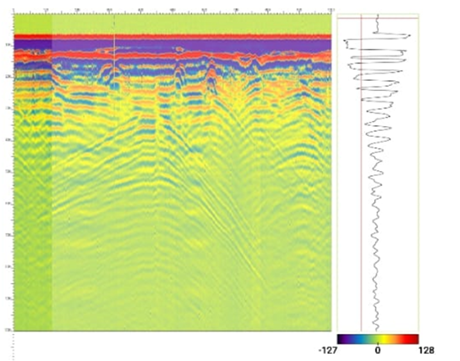 También aquí puede ver grandes parábolas borrosas que bajan hasta el final de la imagen: estos son reflejos a lo largo del canal de aire de varios objetos, en este caso, líneas eléctricas que estaban cerca. En mi opinión, este es un gran problema que aún no ha encontrado solución en los desarrollos que conozco. La información sobre los reflejos fuera del entorno investigado es claramente superflua, distrae la atención e interfiere en la interpretación de la señal útil, ya que es necesario analizar constantemente el entorno y decidir si este reflejo procede del subsuelo o del aire. Por lo tanto, se planea utilizar software y hardware para minimizar los reflejos en el aire.
También aquí puede ver grandes parábolas borrosas que bajan hasta el final de la imagen: estos son reflejos a lo largo del canal de aire de varios objetos, en este caso, líneas eléctricas que estaban cerca. En mi opinión, este es un gran problema que aún no ha encontrado solución en los desarrollos que conozco. La información sobre los reflejos fuera del entorno investigado es claramente superflua, distrae la atención e interfiere en la interpretación de la señal útil, ya que es necesario analizar constantemente el entorno y decidir si este reflejo procede del subsuelo o del aire. Por lo tanto, se planea utilizar software y hardware para minimizar los reflejos en el aire.
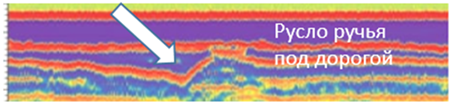 Aquí en esta imagen: un arroyo, enterrado durante la construcción de la carretera; el canal se puede ver a una profundidad de unos 2 metros. Debajo, en esta sección, también había grandes parábolas: reflejos de los postes de iluminación a lo largo de la carretera.
Aquí en esta imagen: un arroyo, enterrado durante la construcción de la carretera; el canal se puede ver a una profundidad de unos 2 metros. Debajo, en esta sección, también había grandes parábolas: reflejos de los postes de iluminación a lo largo de la carretera.
Cerca de mi casa hay un río Neznayka con una geología muy interesante, donde todo es como en un libro de texto: hay un antiguo cauce, depósitos cuaternarios, aluviones, terrazas fluviales. Allí también fuimos con los chicos de VNIISMI, probamos, comparamos el trabajo de diferentes georadares. Aquí, al final, se puede ver el antiguo cauce del río, y las grandes parábolas verdes son el reflejo de la valla del pueblo vecino sobre postes metálicos.
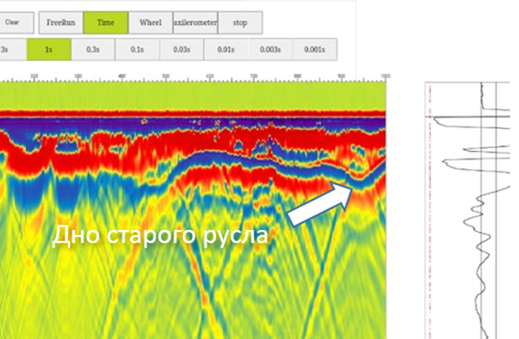 Como puede ver, solo una persona que ya esté familiarizada con los principios de interpretación de tales imágenes determinará de inmediato que se trata de un lecho de río, y esto es un reflejo de una cerca. Por lo tanto, la forma misma de salida de datos limita significativamente el círculo de personas que pueden comenzar a trabajar fácilmente con GPR. Y aquí, en mi opinión, hay una tarea muy interesante: traducir estos datos en una imagen que cualquier usuario pueda entender. Esta tarea se puede realizar utilizando inteligencia artificial (redes neuronales), que se puede entrenar para marcar, designar los contornos reales de los objetos y asumir su propósito y propiedades. Las construcciones volumétricas también ayudarán a resolver el problema de los datos ilegibles, pero hablaremos de eso más adelante.
Como puede ver, solo una persona que ya esté familiarizada con los principios de interpretación de tales imágenes determinará de inmediato que se trata de un lecho de río, y esto es un reflejo de una cerca. Por lo tanto, la forma misma de salida de datos limita significativamente el círculo de personas que pueden comenzar a trabajar fácilmente con GPR. Y aquí, en mi opinión, hay una tarea muy interesante: traducir estos datos en una imagen que cualquier usuario pueda entender. Esta tarea se puede realizar utilizando inteligencia artificial (redes neuronales), que se puede entrenar para marcar, designar los contornos reales de los objetos y asumir su propósito y propiedades. Las construcciones volumétricas también ayudarán a resolver el problema de los datos ilegibles, pero hablaremos de eso más adelante.
La siguiente imagen muestra un relieve muy interesante (filmado el 22 de julio de 2020 en la región de Ivanovo, aldea de Kalinkino): se ve algún tipo de estructura oblonga; lo más probable es que sea una capa de arena o alguna otra menos densa que la marga y el suelo que prevalecen en nuestra área. Tengo una idea para automatizar completamente la identificación de capas. Como definimos anteriormente, la onda se refleja desde aquellos lugares donde hay un cambio en la constante dieléctrica del medio. Podemos medir la velocidad del pulso en una u otra capa de esta imagen y asumir la composición del ambiente y / o el grado de humedad.

Al final del verano, logré ir en una expedición arqueológica cerca de Ryazan cerca del pueblo de Terekhovo, distrito de Shilovsky, al sitio de un campamento / asentamiento del siglo V. Allí, en la convergencia de dos ríos, hay una colina cubierta de árboles; hay numerosas evidencias de que en el siglo V hubo un asentamiento. Comenzamos a caminar hacia allí con un georadar; en la primera imagen, nuestro rastreo de GPS. Los árboles crecieron muy densamente en el centro, pudimos caminar a lo largo del perímetro, había menos árboles más allá y todos caminamos bastante densamente. Tuve la oportunidad de usar un programa que se anunció como un programa que te permite construir un modelo 3D a partir de penetraciones lineales. Los arqueólogos esperaban de mí tal resultado: “construiremos y veremos claramente qué está enterrado y dónde”. Es mejor hacer tales construcciones a partir de áreas bien (densamente) cuidadas.Cargué el área con los pases más densos en el programa y entré en el modo 3D: el programa construyó un campo de barras de color que se podían "tirar" hacia arriba y hacia abajo, cambiando la configuración, no vi más posibilidades; después de consultar, descubrí que el programa solo construye pseudo 3D.
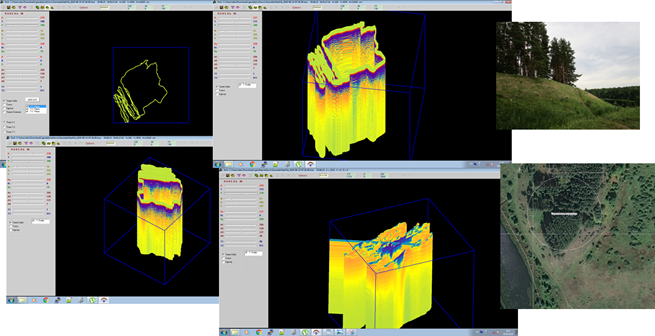
Imaginemos que tenemos algunas columnas que conocemos, donde el radar de penetración terrestre ha viajado desde arriba, y sabemos que está verticalmente hacia abajo en este punto. La siguiente tarea es completar las columnas que faltan por aproximación, que es lo que hizo el programa. Pero lo hizo cursi con una cuadrícula a lo largo de 2 ejes. Como resultado de esta construcción, surgen varios artefactos: cruciformes, de líneas horizontales y verticales. Si tomamos una porción de un plano 3D, tenemos una imagen en color de una porción de columnas, que el programa simplemente tira hacia arriba o hacia abajo, dependiendo de la amplitud de la señal.

La construcción en 3D real es algo más complicada: necesitamos identificar ciertos planos a partir de puntos filmados físicamente a diferentes profundidades, planos de transición de uno a otro y luego, utilizando la interfaz de usuario, poder seleccionar planos individuales que necesitamos mostrar.
La construcción de un modelo volumétrico es generalmente una tarea independiente muy interesante. Ahora estoy pensando en la idea de usar una antena con un Transmisor y 2 antenas con Receptores separados entre sí, es decir, 2 Receptores. Resulta una especie de antena de matriz en fase. En el momento en que viaja la señal, más precisamente por la diferencia en el tiempo en que fue recibida por el primer y segundo receptor, puede determinar el lugar exacto donde se reflejó esta señal. Por lo tanto, en una medición, midiendo un solo pulso, podemos construir inmediatamente una imagen en un plano 2D. El radar convencional utiliza frecuencias portadoras, transformadas de Fourier y trazados de seno y coseno. En este caso, se utilizan algunas matemáticas excelentes:Basándonos en los datos sobre la reflexión de un pulso de un solo nanosegundo, hacemos una convolución y luego calculamos de dónde vino este pulso con qué probabilidad. Esta idea se encuentra ahora en la etapa de software de escritura, lo que permitirá inmediatamente durante el paso simular una imagen en 3D, así como medir la velocidad del pulso en capas, lo que nos permitirá asumir de inmediato la composición y calidad del medio.
¿Dónde se puede utilizar GPR?
Las capas superiores debajo de la superficie de la tierra se denominan "capa cultural": esto es arqueología, los objetos individuales, los cimientos de los edificios son perfectamente visibles, incluso excavados y una vez que los pozos son visibles. Entonces, hay un problema muy interesante asociado, por ejemplo, con el desierto del Sahara. El Sahara se está expandiendo y muchos arqueólogos están de acuerdo en que las ciudades y los edificios están enterrados bajo sus arenas. En los días de Egipto, había una sabana, fluían ríos, vivían animales. GPR puede escanear todo hasta el suelo y encontrar edificios y asentamientos allí. En realidad, este es el único dispositivo que puede hacer esto.
Por cierto, la profundidad de escaneo depende de la densidad y el tipo de suelo, su mineralización y contenido de humedad. La arena es el suelo en el que el GPR ve más profundo. El segundo medio de este tipo, que es muy permeable al GPR, es el hielo. Por lo tanto, el GPR se puede utilizar para sondeos subterráneos de cuerpos de agua. En agua salada, la profundidad del sondeo será menor, en agua dulce será más profunda y el sondeo más profundo se puede realizar en hielo.
Otra aplicación de GPR es la búsqueda de servicios públicos subterráneos, tuberías, pasajes, túneles. La calidad de la construcción de la carretera se puede controlar de manera muy eficaz: el grosor del sustrato de arena se colocó, si el asfalto se colocó de manera uniforme. También puede comprobar el estado de los cimientos y muros de los edificios. Es posible monitorear el estado de la carretera durante la operación para tomar medidas oportunas en caso de socavamiento de la carretera, formación de cavidades kársticas, mientras que esto aún no ha provocado una falla. La erosión se produce bajo los cimientos de edificios y estructuras. Entonces, la razón del derrame de petróleo en Norilsk fue que la base del almacenamiento de petróleo se socavó. Los controles regulares de tales objetos ayudarían a prevenir con éxito tales desastres.

Geología. Durante los estudios de georadar, los límites de los ríos, afloramientos de piedra caliza, dónde se encuentran las capas de rocas, son tuberías de kimberlita claramente visibles, morrenas. Mediante indicadores indirectos, se puede determinar el agua subterránea. Entonces, el agua se filtra hasta que se encuentra con alguna capa a través de la cual no puede filtrarse y se acumula en el borde de las capas en las tierras bajas. También es posible predecir y prevenir corrientes de lodo, deslizamientos de tierra. GPR puede ser útil en la exploración de minerales, incluida la perforación.
En diciembre de 2020, la versión básica del dispositivo fue probada y certificada con éxito. El radar de penetración terrestre se llamó GEORA.
El primer lote pequeño se está preparando para su lanzamiento. El objetivo es comenzar a adquirir una experiencia más amplia de uso práctico y, en base a esta experiencia, identificar oportunidades para mejorar la usabilidad y la funcionalidad. La segunda tarea es crear un software de próxima generación que hará que el análisis de datos sea visual y conveniente incluso para un usuario no preparado.
Se planean dos versiones para un amplio lanzamiento: para uso privado y para uso comercial. Es posible personalizar equipos y software para cualquier tarea.
El objetivo global es hacer del georadar algo más masivo, asequible para una persona interesada en la historia y la arqueología. Disponible para empresarios individuales que trabajan en el campo del diseño, la construcción, la experiencia y la investigación del subsuelo. La adopción generalizada del instrumento formará una comunidad de usuarios. Los planes son crear una base de datos de medición centralizada. Para que cualquiera, si lo desea, pueda enviar datos escaneados al servidor, compartirlos de forma reembolsable o gratuita. Además, una mayor variedad de datos permitirá entrenar de manera más efectiva a la red neuronal para interpretar los resultados del escaneo y la visualización que sea comprensible para una persona común.
Ahora se está preparando para su publicación la segunda parte del artículo con una descripción detallada de la parte técnica. Eso es todo por hoy, si está interesado, escriba, envíe un correo sokolov.labs@gmail.com . ¡Adiós a todos, gracias por su atención!