En este artículo intentaré esbozar la esencia de mi proyecto y mostrar el proceso que fluyó desde el boceto de un perro robot hasta el pedido de placas de circuito impreso para un guante.
comienzo
El guante es directamente de mi proyecto Mark y también es una parte importante de él, por lo que debería comenzar con él.
El primer prototipo del robot se fabricó una noche del verano de 2018. Era un robot de cuatro patas compuesto por 8 servos SG90 (azul normal) y trozos de clavos. Todo esto estaba conectado con pegamento termofusible y no tenía una sola posibilidad de funcionamiento normal debido a la muy mala distribución de la masa. Pero yo no sabía esto, y esa noche lo obligué a caminar en línea recta, y otros 15 minutos después de eso, la tabla por la que se suministraba la energía comenzó a humear y apareció un estabilizador lineal sellado en la mesa (por cierto, no entendí lo que sucedió allí). ...
No pude arreglar este montón de clavos de pegamento caliente y cinta aislante. En mi defensa puedo decir que en ese momento no sabía soldar, desde electrónica solo entendía que era imposible cerrar + y -, pero no había oído hablar de la existencia de la impresión 3D.
A finales del verano encargué mi primera impresora: Anet A8.
Impresora ordinaria para familiarizarse con la tecnología: un marco acrílico, cinemática con "paneles de yeso" y motores ruidosos (más bien sus controladores)
Casi inmediatamente después de comprarlo, dominé tinkercad, donde recreé ese robot en 4 patas, ya con la sustitución de las uñas por plástico y añadiendo un servo rotativo.
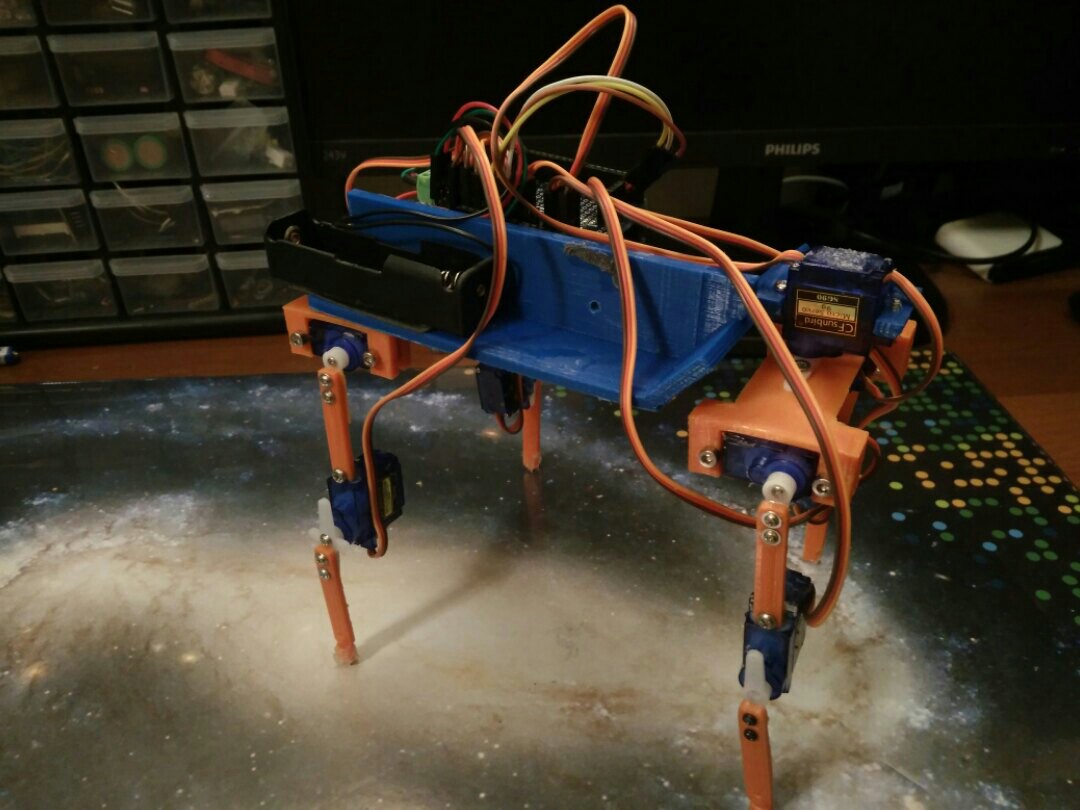
Esta creación nunca llegó, pero me animó a crear otras versiones. Tal vez haga un artículo aparte para mis robots con patas de gusano, así que solo les daré una secuencia de fotos de las versiones.
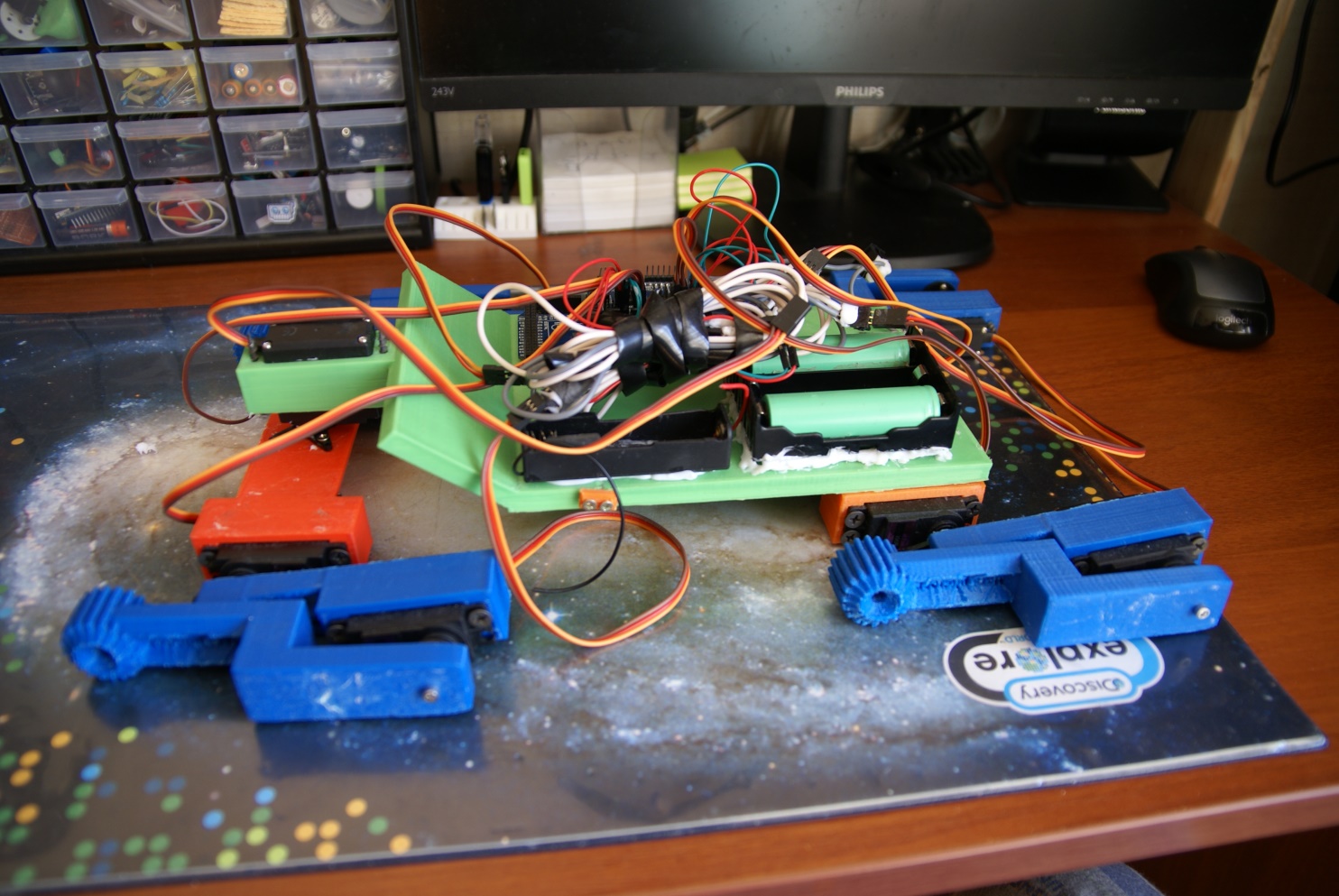

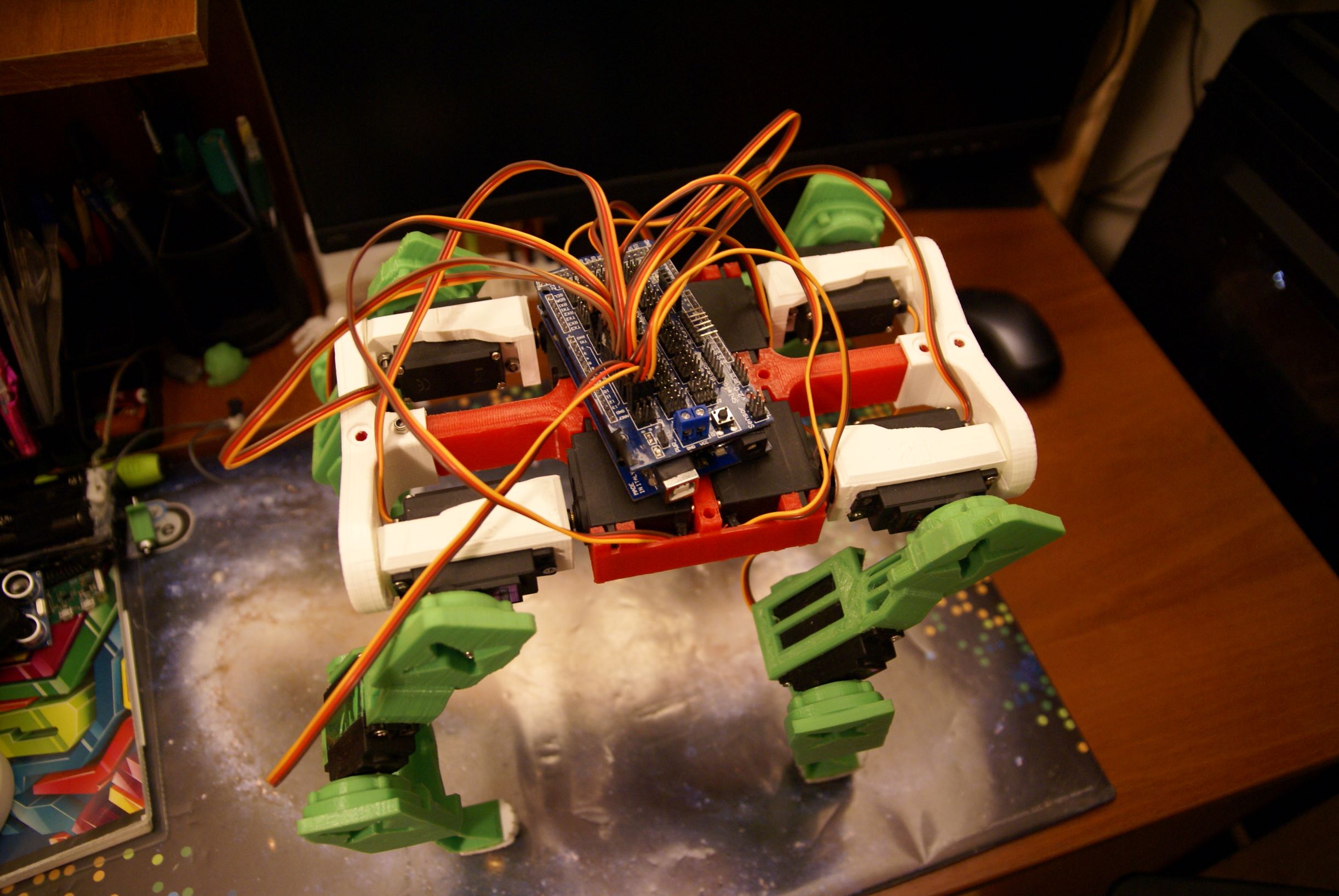
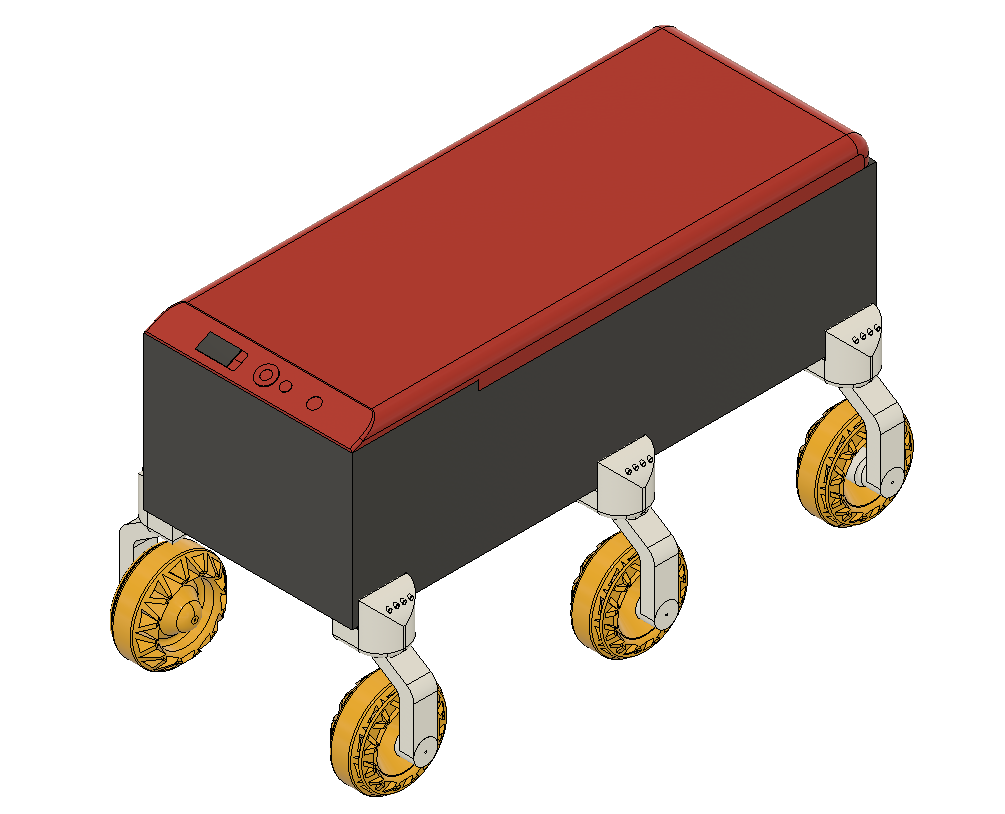
La última versión ahora está adquiriendo carrocería, pero caminaba con normalidad y tiene una buena capacidad de carga.
2 Mark. , . - , .
:
Mark - , - .
Mark 6 - , .
Mark 3 - , , 4 .
Mark 4 - , .
Mark 5 - 6 . .
Mark 7 - , Mark 5 .
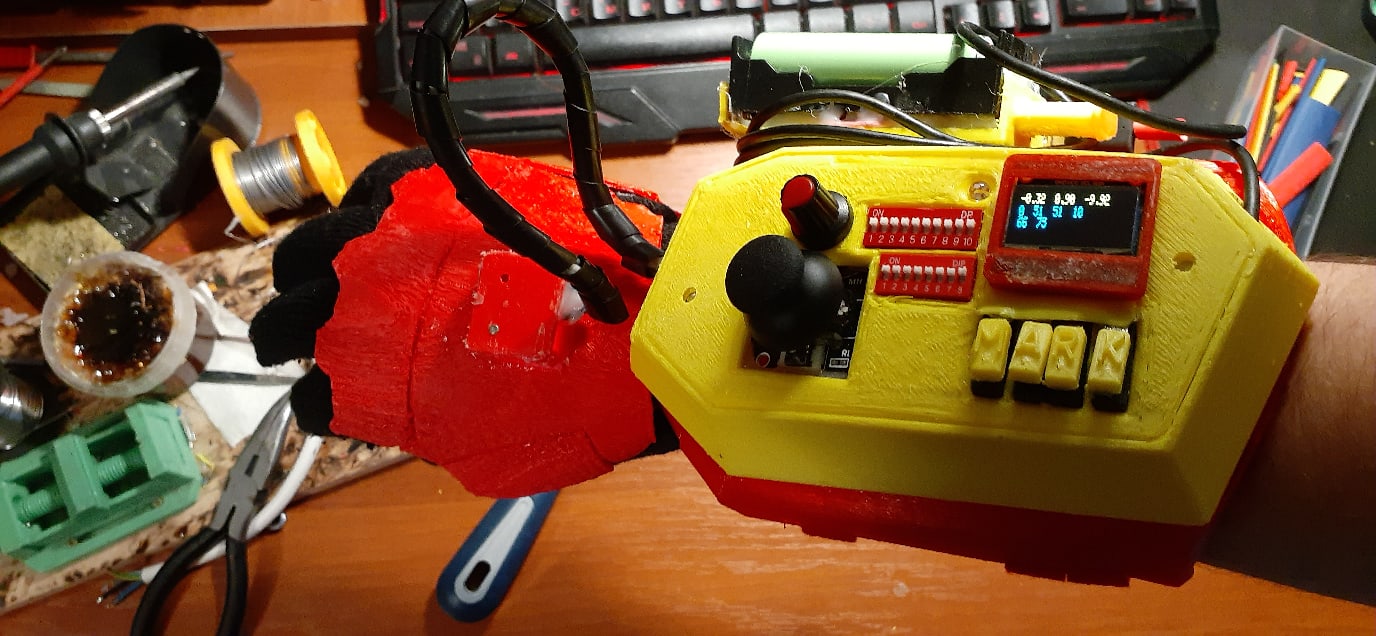
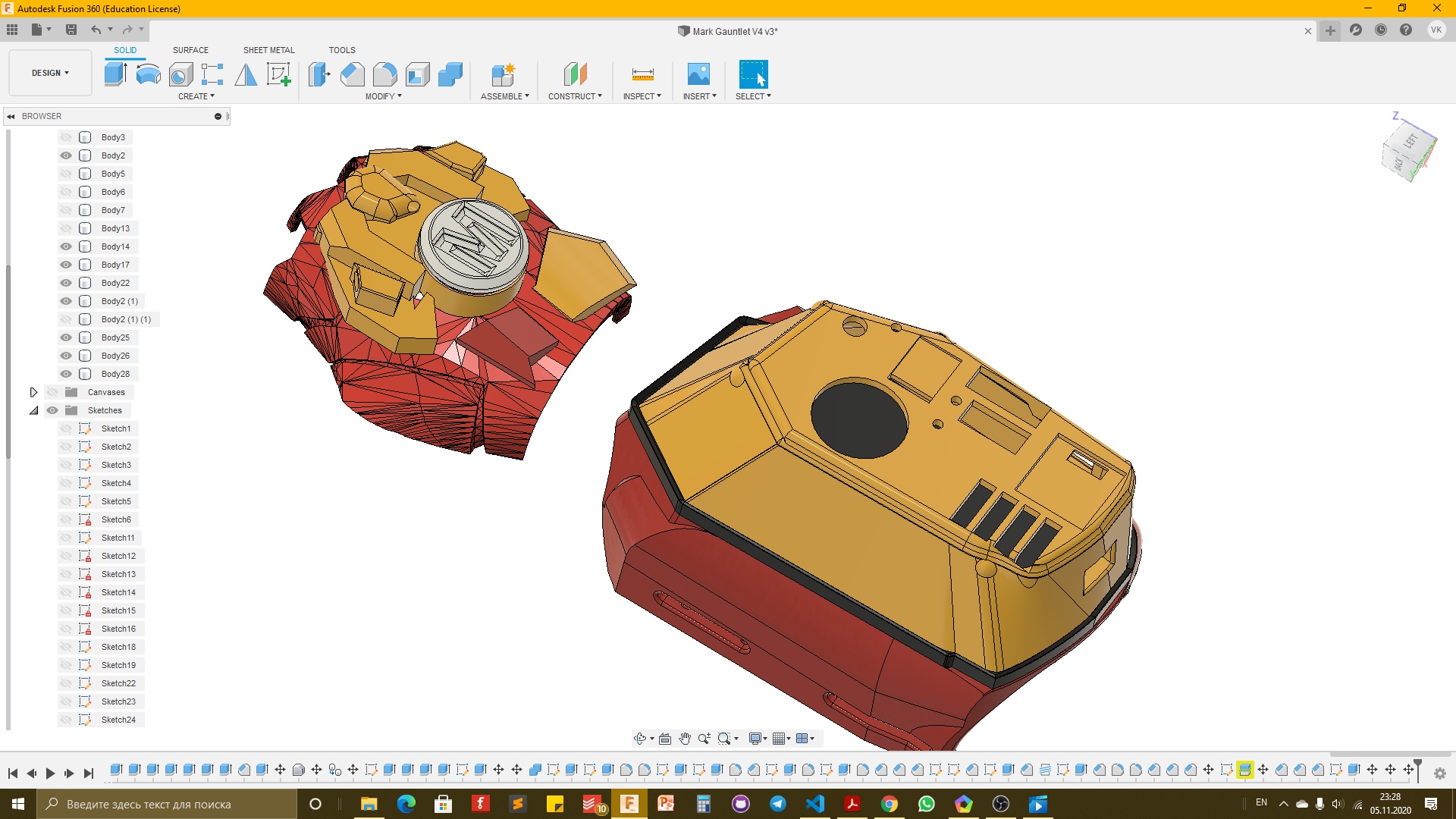
Mark gauntlet – .
Mark 6, Mark 4, Mark 3 Mark gauntlet.
Mark 6 ,
: 1
2020 , : 433 . ( , ) https://youtu.be/eEAHhr9Suug?t=194

: 2
2 , .

nrf24l01, . https://youtu.be/P_fq7KkfJrI
Rukami. 2-3 , .
: 3 4
.
3 :
:
WiFi esp8266
NRF24l01+
433
Bluetooth
+
OLED
, - . https://youtu.be/52WvejA6dyk .
4 :
Atmega2560
:
:
WiFi
NRF24L01+
LoRa
MP3
- ( )
+
+
OLED
, 4.2
4.2
, ,
-
4
3 18650 3.4 * , . .
2 ,

, . LoRa . : https://github.com/Madjogger1202/Mark_GauntletV4.2/blob/main/src/main.cpp
.
/*
Hi stranger, this is main code file for this project
I'm not a 100% programmer, but i can make electronics work,
so i will be grateful if you add any features
it is fully opensource project, so anyone can build stuff based on this code
have a great time reading this badly written working code (^_^)
*/
#include <Arduino.h> // why not...
#include <Wire.h>
#include <SPI.h>
// i have to make all modules work, so i will use some libraris to make life easier
//1) Display. im using 0.96 oled from china, it is not standart at dimentions, bt i like how it looks in final designs :)
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h> // Adafruit librari works 50/50, it depends on display driver (yes, they can hava same names, bt diffrent drivers)
//2) RGB Led panel. LEDs 2812 (8-bit panel)
#include <microLED.h>
//3) NRF24L01+
#include <nRF24L01.h>
#include <RF24.h>
//4)APDC9960 usefull sensor
#include "Adafruit_APDS9960.h"
//5) LoRa radio sx1278
#include <RH_RF95.h>
//6) MPU6050 gyro + acsel
#include <Adafruit_Sensor.h>
#include <Adafruit_MPU6050.h>
//7) MP3 module
#include <DFPlayer_Mini_Mp3.h>
// first switches connection
int8_t first_sw[8] = { A14, A13, A12, A11, A10, A9, A8, A7 };
// second switches connection
int8_t second_sw[8] = { 38, 37, 36, 35, 34, A6, 32, A15 };
// buttons connection
int8_t buttons[4] = { A3, A1, A0, A2 };
#define LED1 10
#define LED2 11
#define JOY_X A6
#define JOY_Y A5
#define POT A4
#define LORA_D0 42
#define LORA_NSS 43
#define LORA_RST 44
#define NRF_CSN 40
#define NRF_CE 41
#define IR_LED 7
#define R_LED 4
#define G_LED 5
#define B_LED 6
#define WS_LED 45
LEDdata leds[8];
microLED strip(leds, 8, WS_LED);
#define ORDER_GRB
RF24 radio(NRF_CE, NRF_CSN);
Adafruit_MPU6050 mpu;
Adafruit_SSD1306 display(128, 32, &Wire, -1);
Adafruit_APDS9960 apds;
volatile bool irqMPU;
volatile bool irqAPDC;
struct allData
{
volatile boolean irqMPU;
volatile boolean irqAPDC;
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
uint8_t led1Mode;
uint8_t led2Mode;
uint8_t redLedMode;
uint8_t blueLedMode;
uint8_t greenLedMode;
uint8_t wsLedMode;
}mainData;
struct radioData
{
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
} telemetriData;
void readMode();
void readCh();
void readAcs();
void readJoy();
void readPot();
void readButtons();
void sendNRF();
void sendBL();
void sendLoRa(); // will reliase it soon
void displayInfo();
// at all it is possible to create up to 256 diffrent modes,
// but if you need more - connect mode counter with channel counter (maybe partly)
void n1Mode();
void n2Mode();
void n3Mode();
void n4Mode();
void n5Mode();
void n6Mode();
void n7Mode();
void n8Mode();
void n9Mode();
void n10Mode();
void n11Mode();
void n12Mode();
void acsel()
{
mainData.irqMPU=true;
}
void gesture()
{
mainData.irqAPDC=true;
}
void setup()
{
for(int i=0;i<8;i++)
pinMode(first_sw[i], INPUT_PULLUP);
for(int i=0;i<8;i++)
pinMode(second_sw[i], INPUT_PULLUP);
for(int i=0;i<4;i++)
pinMode(buttons[i], INPUT_PULLUP);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
analogWrite(LED1, 10);
analogWrite(LED2, 100);
pinMode(JOY_X, INPUT);
pinMode(JOY_Y, INPUT);
pinMode(POT, INPUT_PULLUP);
pinMode(LORA_D0, OUTPUT);
pinMode(LORA_NSS, OUTPUT);
pinMode(LORA_RST, OUTPUT);
pinMode(NRF_CSN, OUTPUT);
pinMode(NRF_CE, OUTPUT);
pinMode(IR_LED, OUTPUT);
pinMode(R_LED, OUTPUT);
pinMode(G_LED, OUTPUT);
pinMode(B_LED, OUTPUT);
pinMode(WS_LED, OUTPUT);
strip.setBrightness(130);
strip.clear();
strip.show();
strip.fill(mCOLOR(YELLOW));
strip.show();
Serial.begin(115200);
Serial2.begin(9600);
mp3_set_serial(Serial2);
mp3_set_volume(30);
mp3_play (1);
if (!mpu.begin())
Serial.println("Sensor init failed");
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32
Serial.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
display.display();
display.clearDisplay();
display.display();
if(!apds.begin())
Serial.println("failed to initialize device! Please check your wiring.");
apds.enableProximity(true);
apds.enableGesture(true);
radio.begin();
radio.setChannel(100);
radio.setDataRate (RF24_1MBPS);
radio.setPALevel (RF24_PA_HIGH);
radio.openWritingPipe (0x1234567899LL);
radio.setAutoAck(false);
attachInterrupt(0, acsel, RISING);
attachInterrupt(1, gesture, RISING);
Serial1.begin(9600); // bluetooth module connected to Serial1
delay(5000);
mp3_stop ();
}
void loop()
{
readMode();
readCh();
readAcs();
readJoy();
readPot();
readButtons();
Serial.println(digitalRead(A14));
Serial.println(digitalRead(A13));
Serial.println(digitalRead(A12));
Serial.println(digitalRead(A11));
Serial.println(digitalRead(A10));
Serial.println(digitalRead(A9));
Serial.println(digitalRead(A8));
Serial.println(digitalRead(A7));
Serial.println();
Serial.println();
displayInfo();
switch (mainData.mode)
{
case 0:
n1Mode();
break;
case 2:
n2Mode();
break;
case 3:
n3Mode();
break;
case 4:
n4Mode();
break;
}
}
void readAcs() // reading acseleration values from sensor directly to main struct
{
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
mainData.x_acs = a.acceleration.x;
mainData.y_acs = a.acceleration.y;
mainData.z_acs = a.acceleration.z;
return;
}
void readJoy() // i am filering analog values for better perfomance
{
mainData.joyX = (analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X))/4;
mainData.joyY = (analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y))/4;
return;
}
void readPot()
{
mainData.potData = analogRead(POT);
return;
}
void readButtons() // buttons : 1) 1; 2)0; 3)1; 4)1; and mainData.button == 1011
{
mainData.button = !digitalRead(A1)*1000+!digitalRead(A2)*100+!digitalRead(A3)*10+!digitalRead(A0);
return;
}
void sendNRF()
{
// i am writing telemetri struct only when sending data
// in this case i can track how relevant telemetri data is
telemetriData.stable = mainData.stable;
telemetriData.x_acs = mainData.x_acs;
telemetriData.y_acs = mainData.y_acs;
telemetriData.z_acs = mainData.z_acs;
telemetriData.mode = mainData.mode;
telemetriData.channel = mainData.channel;
telemetriData.button = mainData.button;
telemetriData.potData = mainData.potData;
telemetriData.joyX = mainData.joyX;
telemetriData.joyY = mainData.joyY;
radio.write(&telemetriData, sizeof(telemetriData));
}
void sendBL(String inp)
{
Serial1.print(inp);
return;
}
// void sendLoRa();
void displayInfo()
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0, 0);
display.print(mainData.channel);
display.print(" ");
display.print(mainData.mode);
display.print(" ");
display.println(mainData.z_acs);
display.print(mainData.button);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.println(mainData.potData);
display.display();
}
void readMode()
{
bitWrite(mainData.mode, 0, (!digitalRead(A14)));
bitWrite(mainData.mode, 1, (!digitalRead(A13)));
bitWrite(mainData.mode, 2, (!digitalRead(A12)));
bitWrite(mainData.mode, 3, (!digitalRead(A11)));
bitWrite(mainData.mode, 4, (!digitalRead(A10)));
bitWrite(mainData.mode, 5, (!digitalRead(A9)));
bitWrite(mainData.mode, 6, (!digitalRead(A8)));
bitWrite(mainData.mode, 7, (!digitalRead(A7)));
return;
}
void readCh()
{
bitWrite(mainData.channel, 0, digitalRead(second_sw[0]));
bitWrite(mainData.channel, 1, digitalRead(second_sw[1]));
bitWrite(mainData.channel, 2, digitalRead(second_sw[2]));
bitWrite(mainData.channel, 3, digitalRead(second_sw[3]));
bitWrite(mainData.channel, 4, digitalRead(second_sw[4]));
bitWrite(mainData.channel, 5, digitalRead(second_sw[5]));
bitWrite(mainData.channel, 6, digitalRead(second_sw[6]));
bitWrite(mainData.channel, 7, digitalRead(second_sw[7]));
return;
}
void n1Mode()
{
sendNRF();
digitalWrite(LED1, !digitalRead(LED1)); // just blink to understand, that it is working
}
void n2Mode()
{
}
void n3Mode()
{
}
void n4Mode()
{
}
void n5Mode()
{
}
void n6Mode()
{
}
void n7Mode()
{
}
void n8Mode()
{
}
void n9Mode()
{
}
void n10Mode()
{
}
void n11Mode()
{
}
void n12Mode()
{
}