Hace poco más de un año tuve la suerte de formar parte del equipo de científicos e ingenieros responsables del funcionamiento del rover Curiosity. Desde entonces, he aprendido MUCHO sobre rovers. Pero queda más por ver. Espíritu, Oportunidad, Curiosidad y Perseverancia son algunos de los robots más sofisticados pero confiables jamás creados por el hombre. Al mismo tiempo, las herramientas y métodos que se utilizan para controlar los rovers son bastante fáciles de aprender y comprensibles. Y eso es bueno, porque el 18 de febrero, Perservance descenderá a la superficie de Marte, tras lo cual será enviado a estudiar el planeta. Ahora mi tarea es contarte cómo controlar el rover. Cuando el nuevo rover llegue a Marte, ya comprenderá lo que está sucediendo y cómo funciona todo.
Gran parte de este artículo es un resumen de mis experiencias con Curiosity. Tenga en cuenta que Spirit y Opportunity son en muchos aspectos similares a su "heredero" en este sentido. Se utilizarán las mismas tecnologías y métodos para administrar Perservance, por lo que no habrá diferencias significativas.
Los basicos
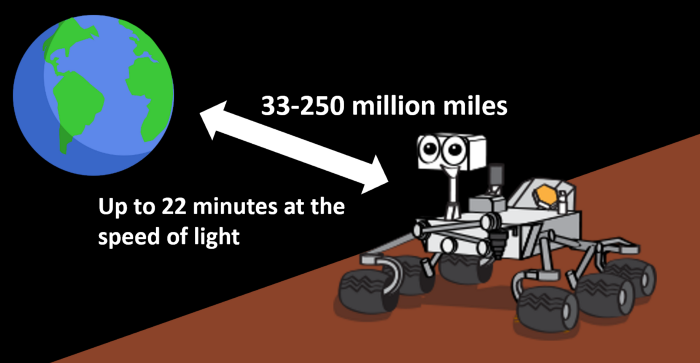
Lo principal que hay que saber es que Marte está muy, muy lejos de nosotros. Una señal de radio enviada desde la Tierra llega a la superficie de Marte en 22 minutos. Por lo tanto, el control en tiempo real no es una opción. Además, Curiosity recibe información de la Tierra una vez al día. El resto del tiempo está solo. Al mismo tiempo, no estamos hablando de ninguna autonomía: el rover tiene un conjunto limitado de acciones que puede realizar de forma independiente. La mayor parte de lo que hace el rover está planificado y escrito en la memoria del dispositivo en la Tierra.
Por supuesto, hay un par de excepciones: el rover debe poder resolver algunos problemas por sí solo. Pero la mayoría de estas decisiones "se detienen y esperan instrucciones de la Tierra en respuesta a algún factor externo". Aegis tiene un cierto grado de autonomía: un sistema que puede seleccionar de forma independiente una pieza de roca en la que Curiosity debería "disparar" con un láser.
Cuida tu paso
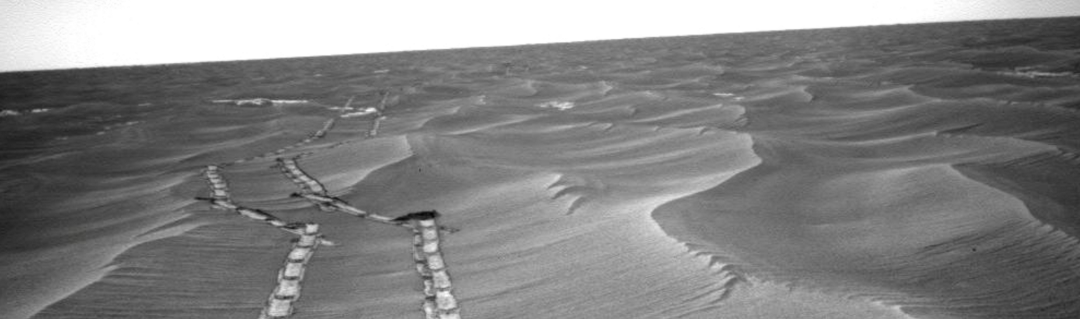
La principal tarea del operador del rover es garantizar su seguridad durante todo el viaje a Marte. Por lo tanto, debe evaluar cuidadosamente todas las opciones posibles para sus acciones. Los rovers de la NASA tienen varias cámaras, gracias a las cuales el rover forma una "imagen" como si lo vieran con ojos humanos. También hay hazcams, "cámaras de peligro", que evalúan problemas en las cercanías, y cámaras de navegación, que son cámaras de navegación que evalúan el camino por delante. También hay otras cámaras, que, sin embargo, se utilizan mayoritariamente para tareas científicas, por lo que me abstendré de describir cómo funcionan.

En la mayoría de los casos, las cámaras de navegación se utilizan para evaluar visualmente la sección de seguimiento del móvil. Las imágenes que reciben pueden verse como una "imagen" tridimensional en la Tierra. La NASA ha desarrollado un software especializado que está diseñado para visualizar el área alrededor del rover y crear un modelo virtual del rover y el área que lo rodea. Este modelo virtual se utiliza para probar las acciones planificadas por el operador. Si la emulación fue bien, los comandos se pueden enviar a Marte. Por lo tanto, los científicos se ahorran las posibles consecuencias negativas de enviar un comando no verificado.
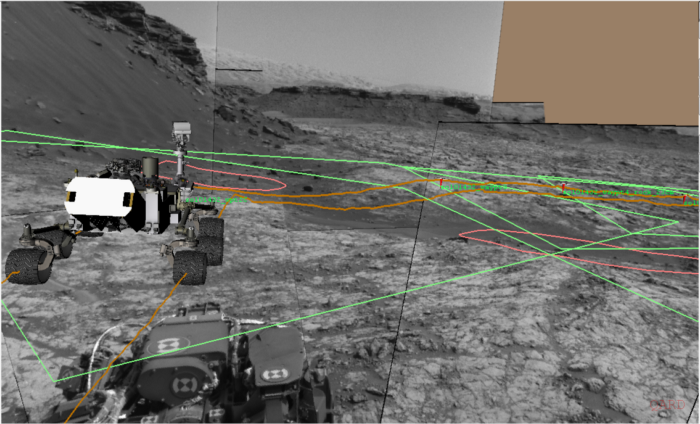
Así es como se ve el movimiento del rover simulado una vez que el modelo está completamente listo. Las áreas grises son la sección de Marte por la que viajará el rover en un futuro próximo. Las líneas de color naranja-marrón son, de hecho, el camino del rover. Se modelan aproximadamente 30 metros de la superficie por día, las cámaras simplemente no pueden recopilar más información, por lo que el rover viaja tanto.
Y aquí está la superposición de la trayectoria del rover simulada sobre las imágenes reales obtenidas por las cámaras de navegación.
Al planificar el movimiento del rover, hay varios puntos importantes a considerar. Por ejemplo, el tamaño de los objetos a lo largo del camino. El tamaño máximo que puede manejar el rover es de unos 50 cm. Cualquier cosa más grande que eso debe redondearse. La arena (no es exactamente arena, pero llamémosla así) también es deseable para doblarse: si hay mucha, el rover puede atascarse. Incluso los pedazos de roca pequeños son peligrosos, ya que sus bordes afilados dañarán las ruedas del rover.
¿Rápido, lento o lento?
Una vez que los científicos han decidido la dirección del movimiento, es necesario comprender exactamente cómo moverse. Hay tres modos: modo ciego, odometría visual y navegación automática.
El modo ciego es el movimiento más fácil posible. En este caso, el rover seguirá las instrucciones enviadas desde la Tierra y no prestará atención a nada. Idealmente, este es un gran método para navegar el rover, pero las condiciones en Marte están lejos de ser ideales. A menudo, los factores externos influyen en el progreso hacia la meta. Esto puede ser, por ejemplo, ruedas deslizantes en la superficie, de modo que el rover, en lugar de moverse 10 metros, se mueva 9 o incluso 5.
Una excelente manera de comprender qué es la conducción a ciegas es cerrar los ojos e intentar seguir un camino determinado. Por ejemplo, 7 metros hacia adelante, luego gire 30 grados a la izquierda y camine otros 4 metros. En este caso, no tenemos idea de lo que está sucediendo a nuestro alrededor y no nos adaptamos a las condiciones cambiantes.
En general, la dirección a ciegas no es la mejor opción, pero permite que el rover se mueva rápidamente, ya que el sistema no necesita detenerse para tomar fotografías. A máxima velocidad, el rover puede recorrer la longitud de un campo de fútbol en solo una hora. Pero esta opción se elige solo si no hay objetos potencialmente peligrosos alrededor.
Odometria visualutilizado por los operadores con más frecuencia. En este caso, el rover se detiene cada metro para tomar una fotografía del suelo con cámaras. Luego, la computadora a bordo evalúa la imagen, la compara con la anterior e intenta averiguar qué ha cambiado a su alrededor, incluida la ubicación del rover. Luego, la computadora envía nuevos comandos de navegación para mantenerlo encaminado.
Este método es similar al anterior, solo que en el proceso de moverse cada par de pasos, debe detenerse para abrir los ojos y mirar a su alrededor.
La odometría visual es un equilibrio entre la velocidad y la precisión del movimiento. El método es extremadamente importante ya que ayuda a detectar obstáculos en el camino del rover y evitarlos.
Navegación automática, o autonav, es el método más avanzado tecnológicamente. Se puede comparar con el uso de un dron en un automóvil. Establecemos un objetivo común y el propio rover busca un camino seguro y rápido hacia el objetivo. El rover tiene que detenerse cada metro para evaluar la situación con cámaras. Pero en lugar de tomar una foto con cámaras de navegación, el rover también usa hazcams. Luego, la computadora de a bordo combina toda esta información, formando un "mapa de peligro". Los lugares problemáticos están marcados en rojo, los lugares donde la situación no es tan grave están marcados en amarillo y el área más adecuada para promover el enrutador está marcada en verde.

Esta es la opción de progresión más lenta para un rover. Si en una situación ideal el rover puede caminar a lo largo de un campo de fútbol usando el método ciego, como se mencionó anteriormente (esto es aproximadamente 100 m), entonces en el caso del modo autónomo, en condiciones ideales, el rover viajará solo 30 metros.
Al mismo tiempo, el rover no puede detectar arena o piedras afiladas, por lo que el método se usa solo cuando el área es absolutamente segura.
¿Qué puedes esperar de la perseverancia?
La NASA espera que el nuevo rover aterrice en la superficie del planeta el 18 de febrero. Después de eso, espero que comience a moverse en Marte. Todo lo que dije anteriormente se aplica al nuevo rover, pero tiene más capacidades. Por ejemplo, podrá moverse al menos dos veces más rápido que Curiosity: la PC integrada tiene más recursos informáticos y algoritmos de procesamiento de datos mejorados. Las cámaras de navegación del robot son de colores, reciben imágenes de mayor resolución que Curiosity. Además, el rover tiene ruedas más gruesas que su predecesor y tiene un dibujo diferente. Los científicos creen que las ruedas se dañarán menos.
Una de las tareas más importantes del rover: recolectar y almacenar muestras para regresar a la Tierra. Mucho depende del éxito de esta misión. Y ahora, cuando el rover comience a moverse, comprenderá qué y cómo proporciona este movimiento.
Nota: Evan Hilgemann es ingeniero mecánico en el Jet Propulsion Laboratory (JPL) de la NASA.
