
El acelerómetro más simple, ¿cómo funciona?
Un acelerómetro es un dispositivo que mide la proyección de la aceleración aparente (la diferencia entre la verdadera aceleración de un objeto y la aceleración gravitacional). Su funcionamiento se puede explicar mediante un modelo sencillo.
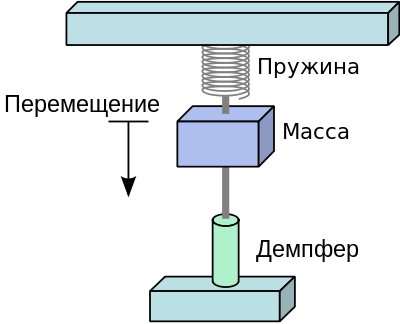
Modelo de dispositivo de acelerómetro mecánico ( original )
A medida que aumenta la aceleración, la masa estirará el resorte. De acuerdo con la ley de Hooke del plan de estudios de física de la escuela, puede encontrar fácilmente la aceleración del sistema:
, donde k es el coeficiente de elasticidad del resorte, Es su extensión ym es la masa de la carga.
Usando tres sensores ubicados perpendicularmente, se puede conocer la aceleración de un objeto a lo largo de 3 ejes y, conociendo las condiciones iniciales, determinar la posición del cuerpo en el espacio.
Este sencillo modelo es la base para el funcionamiento de la mayoría de los acelerómetros, que se pueden dividir en 3 subgrupos principales:
- mecánico
- electrónico
- piezoeléctrico
También los hay térmicos y ópticos, pero no los consideraremos. Si todo está claro con los mecánicos (de hecho, su trabajo se refleja en el modelo de arriba), entonces con los electrónicos y piezoeléctricos es un poco más interesante.
Acelerómetro piezoeléctrico
Este tipo de sensor se basa en el efecto piezoeléctrico, que Smith descubrió en 1954 en semiconductores como el germanio y el silicio. Este descubrimiento dio un fuerte impulso al desarrollo de sensores y generadores. El efecto es la generación de tensión por parte del elemento piezoeléctrico al deformarse.

Animación del efecto piezoeléctrico ( original ) Al
aumentar la aceleración, la masa inerte aumenta / disminuye la presión sobre el elemento piezoeléctrico. Gracias al efecto piezoeléctrico se genera una señal que depende de la aceleración externa.

Dispositivo acelerómetro piezoeléctrico ( original ) Los
sensores de este tipo requieren un amplificador adicional, que aumenta la amplitud de la señal y crea una salida de baja impedancia para trabajar con dispositivos externos. El perno de precarga se utiliza para calibrar el valor de aceleración cero, cuya masa se calcula para corresponder al punto cero de aceleración en el sistema.
Los sensores de este tipo todavía están muy extendidos y se utilizan principalmente en sistemas que requieren una alta fiabilidad: automoción. Para la electrónica comercial, a menudo se utilizan acelerómetros electrónicos, que son más pequeños y económicos.
Acelerómetros electrónicos
El principio de funcionamiento de los sensores electrónicos se basa en un cambio en la capacitancia de los condensadores con un cambio en la aceleración. El modelo de trabajo más simple se muestra en la imagen.
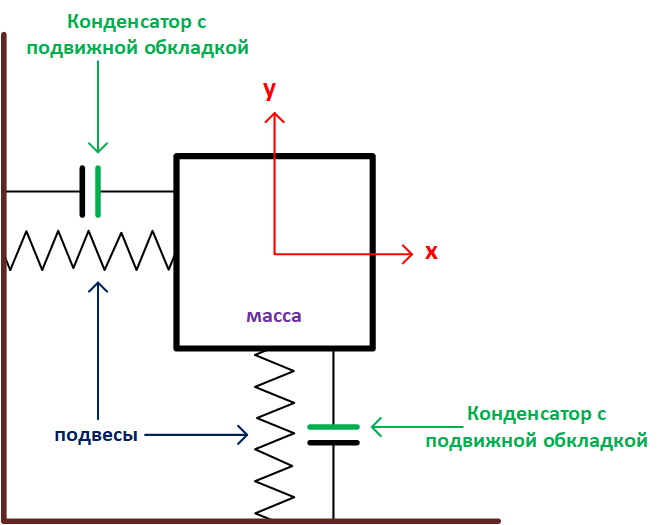
El dispositivo de un acelerómetro electromecánico de 2 ejes.
Cuando cambia la aceleración, la masa cambia la distancia entre las placas del condensador. De la fórmula más simple para la capacitancia de un condensador se deduce que cuando d cambia en la distancia entre las placas, la capacitancia del condensador también cambiará. Este método es ampliamente utilizado debido al desarrollo de MEMS - sistemas microelectromecánicos.
Las tecnologías MEMS permiten crear condensadores con placas móviles sobre un sustrato de silicio, lo que reduce significativamente el tamaño del dispositivo y, lo que no deja de ser importante, su costo.

El dispositivo de un acelerómetro electromecánico de 2 ejes (original del libro "Introductory MEMS" . También se han tomado más ilustraciones de este libro)
El lector probablemente tenga una pregunta: "¿cómo detectar exactamente un cambio en la capacitancia del capacitor?" Intentaré dar una respuesta exhaustiva a esta pregunta.
Dispositivo acelerómetro MEMS. ¿Cómo convertir un cambio de capacitancia en una señal?
Medio puente capacitivo
Entonces, antes de describir el funcionamiento del sensor en sí, pasemos a un circuito bastante popular en los circuitos: el medio puente capacitivo.

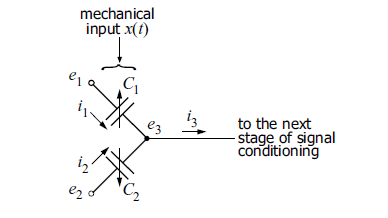
Medio puente capacitivo: la base de los sensores de
voltaje MEMS y son de entrada, y - señal de salida para conversión posterior. Las capacitancias de ambos capacitores dependen de la aceleración externa y cambian por el valor x (t). En x = 0, las cargas de los contenedores son idénticas y, al mismo tiempo, ... Siempre que x << d encontramos cómo el cambio en la capacitancia de los capacitores depende del cambio en la posición de la placa.
Derivación de la fórmula para cambiar la capacidad.
Anotemos el cambio en cada capacitancia cuando la placa se desplaza x:
Escribimos mediante la fórmula de capacidad:
, :
, x <<d, xd d^2 , :
Escribimos mediante la fórmula de capacidad:
, :
, x <<d, xd d^2 , :
Entonces, se ha pasado parte del camino, obtuvimos cómo el valor del cambio en la capacitancia depende del cambio en la posición de la placa (es decir, la aceleración externa). Es hora de detectar este cambio: introducimos corrientes adicionales - ... Ahora queda por calcular cómo dependerá la corriente de salida del cambio en la posición de la placa.
Medio puente capacitivo - corrientes
Derivación de la fórmula para la dependencia de la corriente de salida del cambio en la capacitancia
:
, dq/dt, q=CU, :
, (1.1):
, dq/dt, q=CU, :
, (1.1):
Entonces, si usa los mismos potenciales de los voltajes de entrada obtenemos la dependencia actual:
El resultado es bastante extraño: la corriente de salida no depende de ninguna manera del cambio en la capacitancia. Para detectar un cambio en la capacitancia, es necesario establecer voltajes de diferente polaridad en las placas, es decir: , un ... Luego reharemos la ecuación teniendo en cuenta esta modificación.
Dependencia de la corriente en el cambio de posición de la placa, teniendo en cuenta la diferente polaridad de las tensiones de entrada.
1.3:
:
:
1.2 , :
:
:
1.2 , :
De esta ecuación, los siguientes hechos son visibles:
- si la posición de las placas no cambia con el tiempo, entonces
- de forma similar si la fuente de la señal constante (DC), entonces
Para el funcionamiento efectivo del semipuente capacitivo, es necesario utilizar las señales de entrada variables e1 y e2, cuyo desplazamiento de fase será de 180 grados (para que los potenciales tengan diferentes signos). Por lo tanto, obtenemos la siguiente forma de señales:
dónde - la frecuencia de la señal alterna (determinada en la etapa de diseño, según el ancho de banda del sistema y el funcionamiento normal de los contenedores mecánicos).
Entonces, obtuvimos la ecuación (1.4), que muestra cómo un cambio en la capacitancia del capacitor afecta la salida del sistema. Sin embargo, dicha señal será bastante pequeña en amplitud, además, si le conectamos una carga para comunicarnos con el mundo exterior, todo el sistema colapsará. Aquí se necesita un amplificador ...
Solo agrega un amplificador
Agreguemos un amplificador a nuestro sistema (asumiremos que la ganancia es - el principio de la tierra virtual funciona).
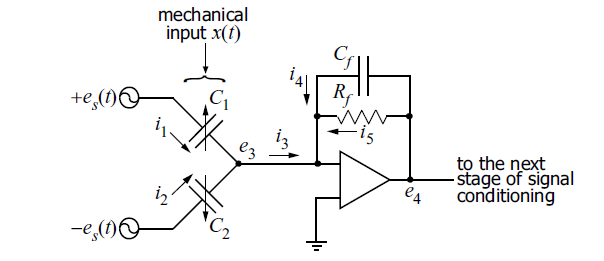
Medio puente capacitivo + integrador
Ahora encontramos la dependencia del voltaje de salida del amplificador del cambio en la capacitancia.
Voltaje de salida del amplificador
:
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
Como resultado, obtuvimos la dependencia de la señal de salida del amplificador del cambio en la posición de la placa del capacitor. El lector atento debería notar inmediatamente que esto es modulación de amplitud. De hecho, en este sistema tenemos una señal x (t), que se multiplica por la señal y amplifica por la cantidad ... El siguiente paso es eliminar la frecuencia portadora , y obtenemos una señal amplificada x (t), que es proporcional a la aceleración. Un largo camino de computación nos ha llevado a comprender la arquitectura del acelerómetro MEMS.
Arquitectura de acelerómetro MEMS
Consideremos primero el diagrama funcional del sensor:
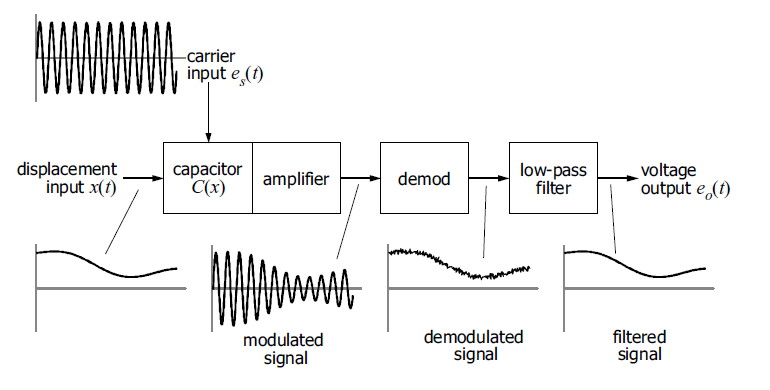
Diagrama funcional de un acelerómetro MEMS
Inicialmente, tenemos una señal x (t), que refleja el cambio en la aceleración. A continuación, lo multiplicamos por la señal portadora. y amplificado con un amplificador operacional (en modo integrador). A continuación, se produce la demodulación, el circuito más simple, un diodo y un filtro RC (en realidad, se utiliza un circuito complicado, sincronizando el proceso de modulación y demodulación con una frecuencia portadora ). Luego, el ruido residual se filtra mediante un filtro de paso bajo.
Como ejemplo, citaré uno de los primeros acelerómetros MEMS de Analog Devices: ADXL50:
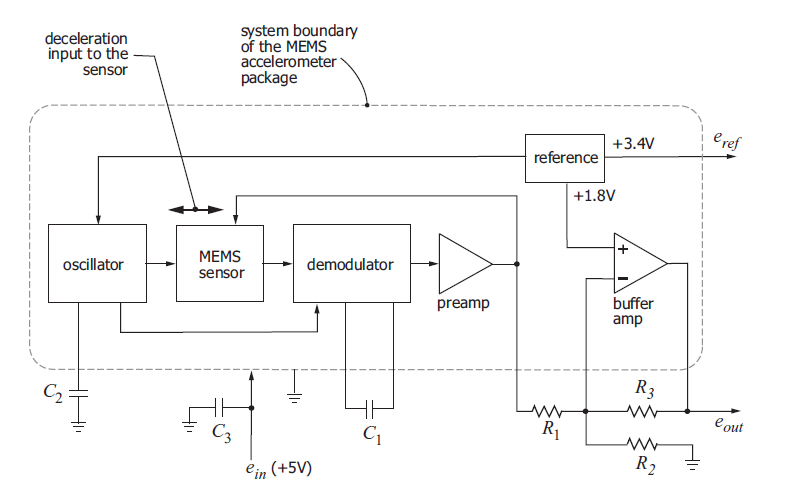
Diagrama de bloques de ADXL50
Probablemente, dando el diagrama de bloques del sensor al comienzo del artículo, muchos lectores no entenderían el propósito de algunos bloques. Ahora el velo está entreabierto y podemos discutir cada uno de ellos:
- El bloque llamado "sensor MEMS" es un medio puente capacitivo.
- El bloque "oscilador" genera una señal a una frecuencia de 1 GHz.
- La señal del oscilador también se utiliza para la demodulación síncrona.
- , ( VDD/2- , — «»).
- .
- , .
?
La elección del transductor para trabajar con sensores depende de la precisión que desee. Para trabajar con sensores, son adecuados los ADC con arquitectura SAR o Delta-Sigma con alta profundidad de bits. Sin embargo, los sensores modernos tienen transductores integrados. Los líderes en esta dirección son STMicroelectronics, Analog Devices y NXP. Como ejemplo, podemos dar un nuevo microcircuito con un acelerómetro de 3 ejes y ADC incorporado - ADXL362.

Diagrama de bloques de ADXL362
Para trabajar con el ADC, se han agregado filtros anti-aliasing al circuito para excluir armónicos adicionales de ingresar al espectro.
¿Dónde conseguir esa tecnología?
Ahora hay muchas fábricas disponibles para empresas sin fábrica que ofrecen tecnología MEMS. Sin embargo, para crear microcircuitos modernos, es necesario integrar capacidades con placas móviles en una ruta de diseño estándar, porque además de dicha capacitancia, es necesario diseñar bloques adicionales (generador, demodulador, amplificador operacional, etc.) en un solo chip. Como ejemplo, las fábricas de TSMC y XFab ofrecen la tecnología para implementar un sensor MEMS junto con todo el arnés. La imagen muestra los contenedores que le permiten crear un acelerómetro de tres ejes:
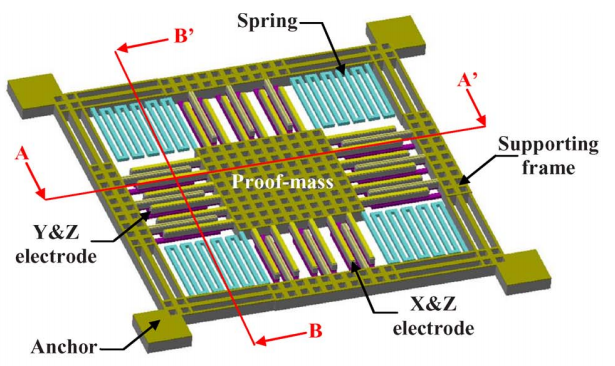
Medio puente capacitivo de tres ejes de TSMC
También hay una fábrica para la producción de sensores MEMS, Sovtest, en Rusia , pero la empresa no tiene la tecnología para integrar bloques de circuitos adicionales que son necesarios para crear el dispositivo final y la única salida es usar tecnología de microensamblaje .
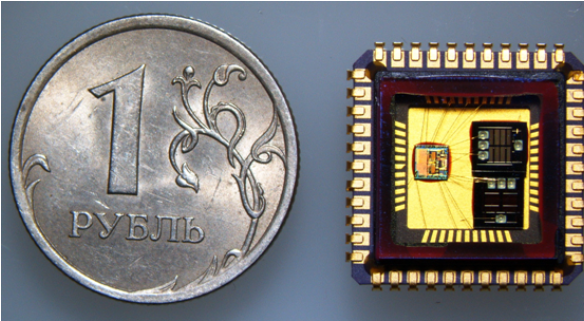
Acelerómetro MEMS desarrollado por Sovtest
¿Qué novedades tiene nuestra empresa en esta dirección?
Tenemos varios transductores que están diseñados para funcionar con sensores. Los nuevos productos incluyen:
- 5101NV035 - Convertidor de 16 canales basado en 8 Delta-Sigma ADC, diseñado para trabajar con sensores de corriente
- 1316NX035 - Convertidor integrado de voltaje-frecuencia (VFC) de 4 canales, diseñado para funcionar con acelerómetros y giroscopios de 3 ejes.
Como escribí en el artículo anterior , el período de espera para las obleas de fábrica puede llevar bastante tiempo. Después de la primera ejecución de prueba del ADC de 400 MHz, el tiempo de llegada de las placas y otras mediciones tomaron más de seis meses. Durante este tiempo, nuestro equipo logró realizar el PNC 1316NX035 (desarrollo del circuito anterior 1316PP1U ), del cual les puedo contar un poco.
Convertidor de tensión-frecuencia
Para convertir los datos del sensor, se suelen utilizar ADC SAR o delta-sigma, pero hay otro tipo de convertidores, los VFC integradores, que tienen ventajas significativas:
- Ocupan menos espacio y tienen menos consumo con la misma linealidad y ruido.
- Arquitectura sencilla.
- Alta inmunidad al ruido de entrada y a las señales de interferencia.
- Inmunidad al ruido e interferencia de la señal de salida.
- La capacidad de transferir datos sin procesar a un canal de comunicación por radiofrecuencia.
El microcircuito 1316NX035 es un convertidor de voltaje a frecuencia de cuatro canales y un código digital; las salidas de un acelerómetro de tres ejes están conectadas a los tres canales principales de alta precisión. El cuarto canal tiene un multiplexor de entrada de 4 canales, al que puede conectar sensores adicionales del sistema: temperatura, humedad, etc. Bajo un microscopio, el circuito se ve así:
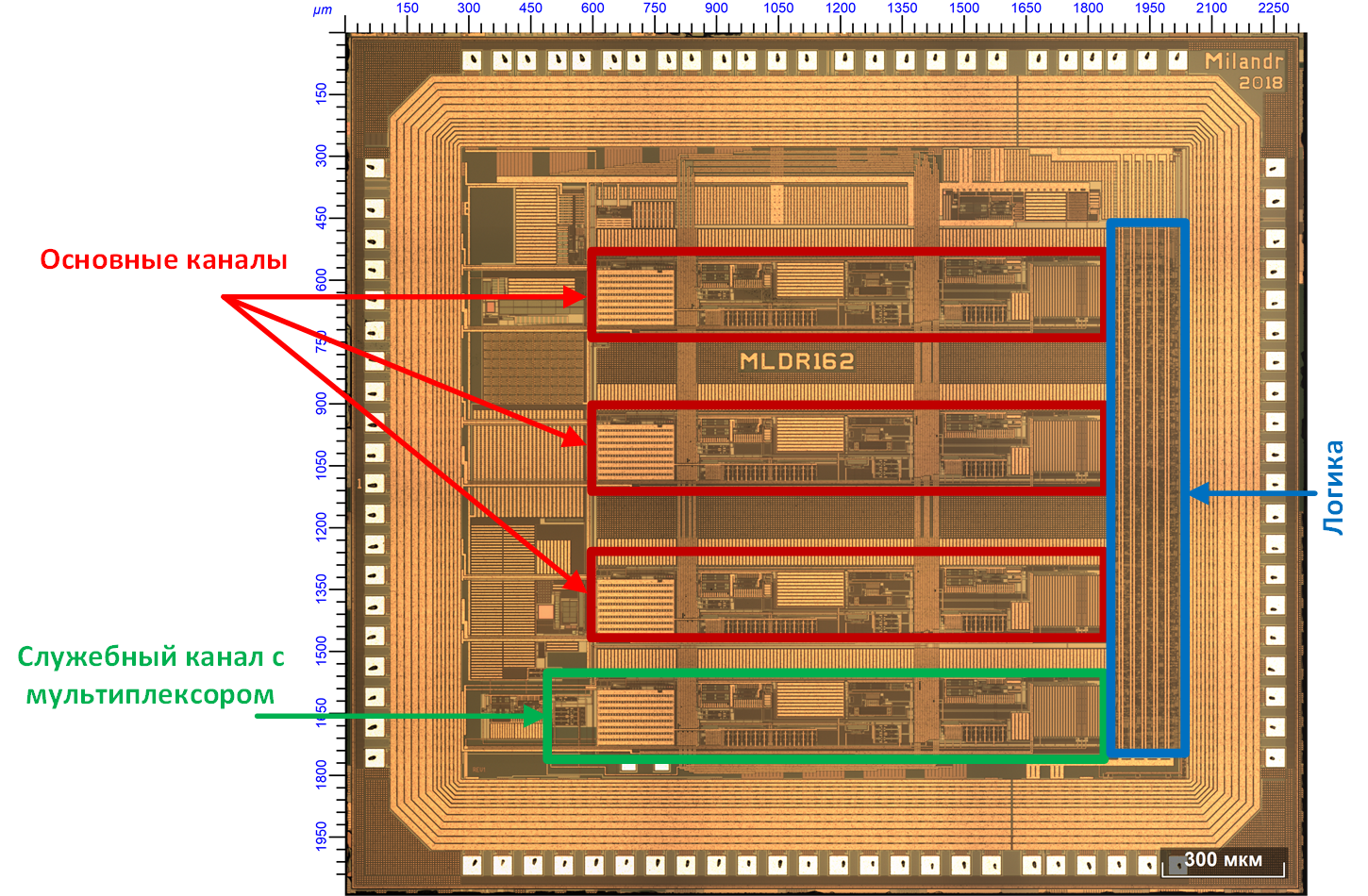
VFC bajo un microscopio
Cada uno de los tres canales principales convierte un voltaje de entrada en el rango de ± 4V a una frecuencia de hasta 1250 kHz en 3 salidas correspondientes a voltajes de entrada positivos y negativos. Además, el microcircuito tiene un contador inverso de 16 bits en cada canal para contar los pulsos de frecuencia. La interfaz SPI se utiliza para controlar los modos de conversión y muestrear el contenido de los contadores de pulsos del canal. Los principales requisitos para los parámetros PNC fueron:
- alta estabilidad térmica y temporal de la frecuencia de salida con señal de entrada cero (entradas puestas a tierra)
- rango dinámico de conversión: no menos de 22 bits
- continuidad de conversión de la señal de entrada e inadmisibilidad de la pérdida de un pulso de frecuencia única.
Para cumplir con los requisitos 1 y 2, se utiliza la autocalibración analógica , que se realiza automáticamente cuando se enciende el circuito, y también se puede iniciar en cualquier momento mediante un comando a través de la interfaz SPI. El requisito 3 se proporciona y garantiza mediante soluciones de circuitos. Nos las arreglamos para lograr parámetros de precisión bastante decentes: la no linealidad de conversión típica fue de 30 ppm, y el desplazamiento cero fue inferior a 0,1 Hz con un coeficiente de conversión de 200 kHz / V. Rango de conversión dinámica: fmax / fmin = 2 * 1.25MHz / 0.3Hz ∿ 8.33M, que corresponde a más de 23 bits.
Solo hay un "pero": la nutrición bipolar. Para garantizar una buena estabilidad cero (voltaje que corresponde a una aceleración de 0g), se debe utilizar una alimentación bipolar. Esta solución es bastante eficaz; después de todo, cuando 0g corresponde a "tierra", el sistema será a priori estable. También mejora el diseño del sistema. En los sensores modernos, la mitad del suministro de Vdd / 2 se usa como cero; sin embargo, si el valor de voltaje en el convertidor difiere del voltaje en el sensor, automáticamente obtenemos una compensación que debe calibrarse adicionalmente.
Probablemente, para muchos consumidores, el voltaje bipolar asusta un poco, y nosotros, como desarrolladores, lo entendemos. Quizás, en el futuro hagamos una versión comercial para MEMS (o integremos el sensor en la PNC). Hasta ahora, por supuesto, estos son solo planes, pero estoy seguro de que verán la luz del día.
PD Encontré fotos adicionales del proceso de investigación de muestra. En general, esta, como para mí, es la parte más interesante del proceso de desarrollo. Te dan en tus manos tu creación en el calor de la fábrica, tú le das energía y cruzas los dedos y esperas - "¿Funciona o no?"

PPS A quien le haya gustado el tema de los sensores, en el futuro un colega del centro de diseño de hardware quisiera hablar sobre el sistema inercial que se está creando basado en sensores MEMS - SINS .