Después de ver videos en Youtube y ver a mis hijos babeando, decidí probar suerte en el autoensamblaje de este dispositivo en hoverboards alquilados. Discutiendo sobre la conveniencia de hacerlo tú mismo o comprarlo, me convencí de que se trata de un juguete y de temporada, y para mis hijos, el clima no puede funcionar con un solo dispositivo. Además, la experiencia de ensamblar una máquina CNC doméstica jugó un papel en la confianza en uno mismo, y la popularidad de la tendencia de hoverboard en sí y el efecto sorpresa en las personas que me rodean jugaron un papel importante.
Experiencia en el montaje de un gyro scooter por su cuenta
Al empezar a trabajar, decidí probar primero el concepto y determinar la potencia requerida de las unidades electromecánicas para justificar nuevas inversiones en componentes.
La primera versión (segway)
Desde un punto de vista mecánico, la versión segway parecía más sencilla (no hay unidad giratoria central cargada), además, todo lo que encontré en youtube es segway casero.
A pesar de que tengo suficiente experiencia en programación y trabajo con controladores, decidí no escribir el software yo mismo, sino buscar las soluciones más listas para usar. Además, rara vez puedo mantener mi motivación durante más de un mes, y la depuración del software con nodos electromecánicos rara vez termina en una victoria absoluta, más a menudo en un compromiso, y la idea de que no se haya logrado la perfección me atormentaría.
Como resultado, la elección recayó en el trabajo del Segway Clone de Ovaltine (la fuente está en GitHub). Este proyecto me pareció el hardware de soporte más maduro que tengo (Arduino, MPU-6050, controladores de motor con 2 y 3 señales de control por canal). El proyecto está ampliamente comentado, lo que permite no profundizar en el análisis de matices y, como resultado, no adivinar las deficiencias.
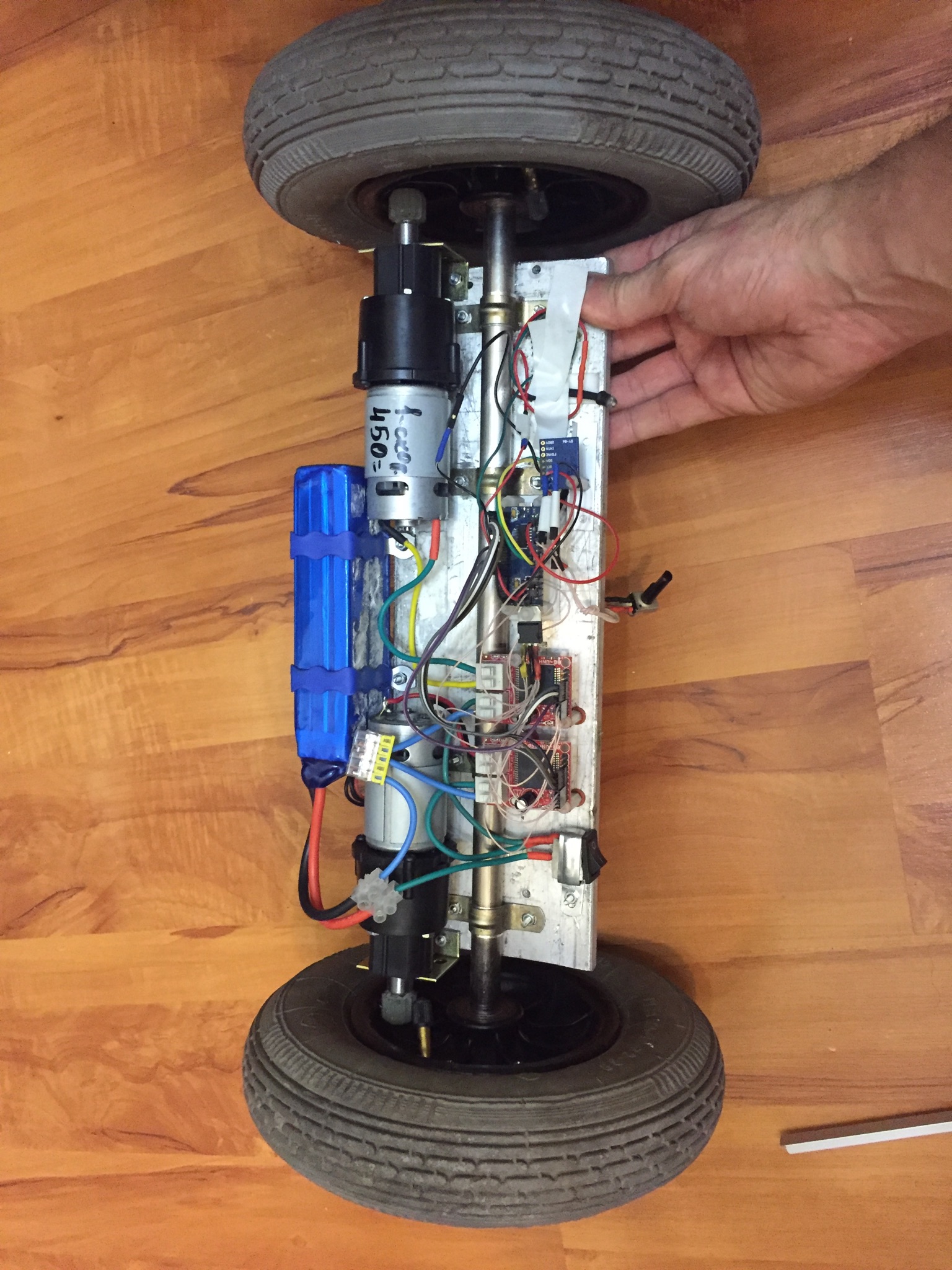
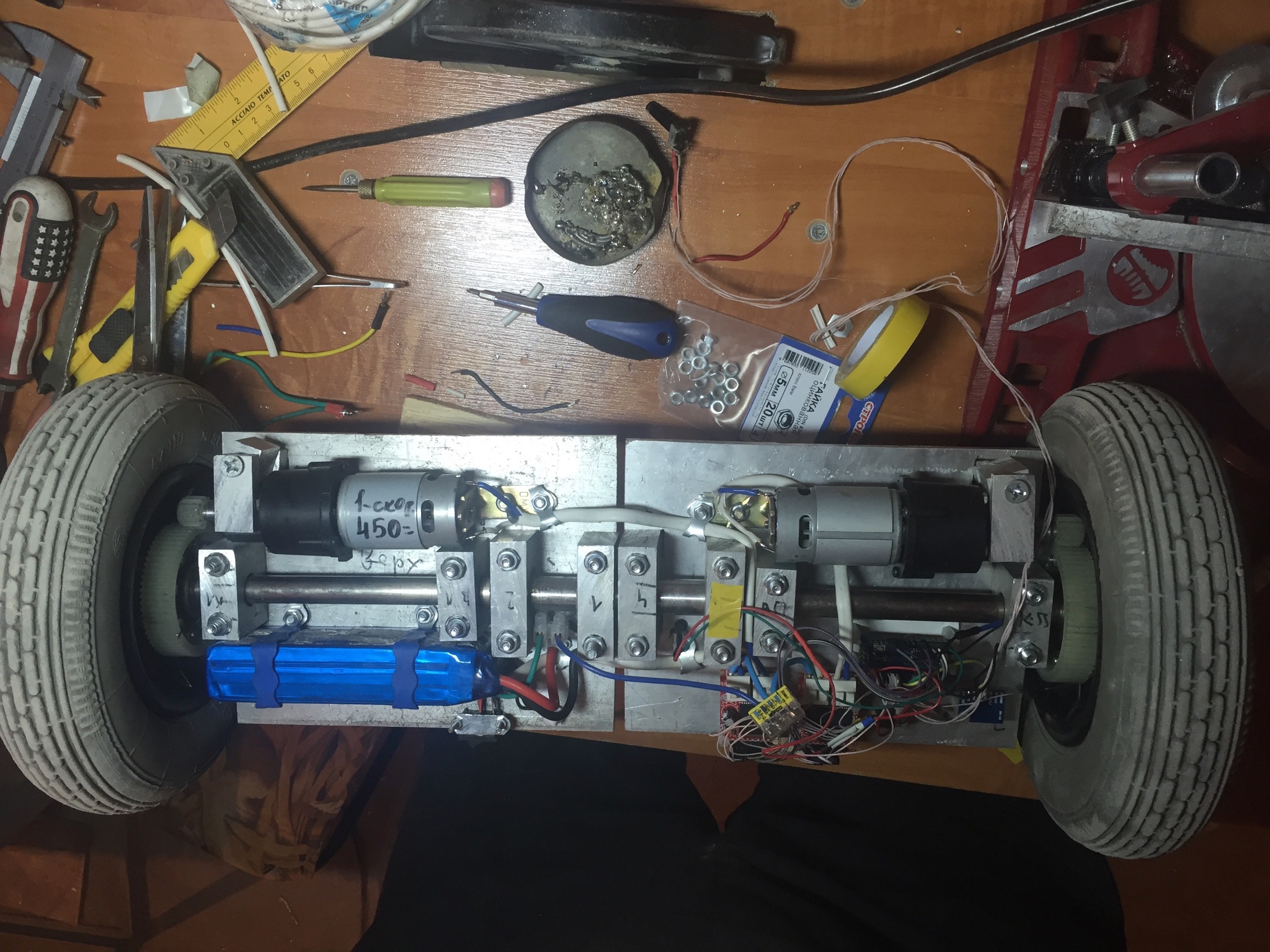
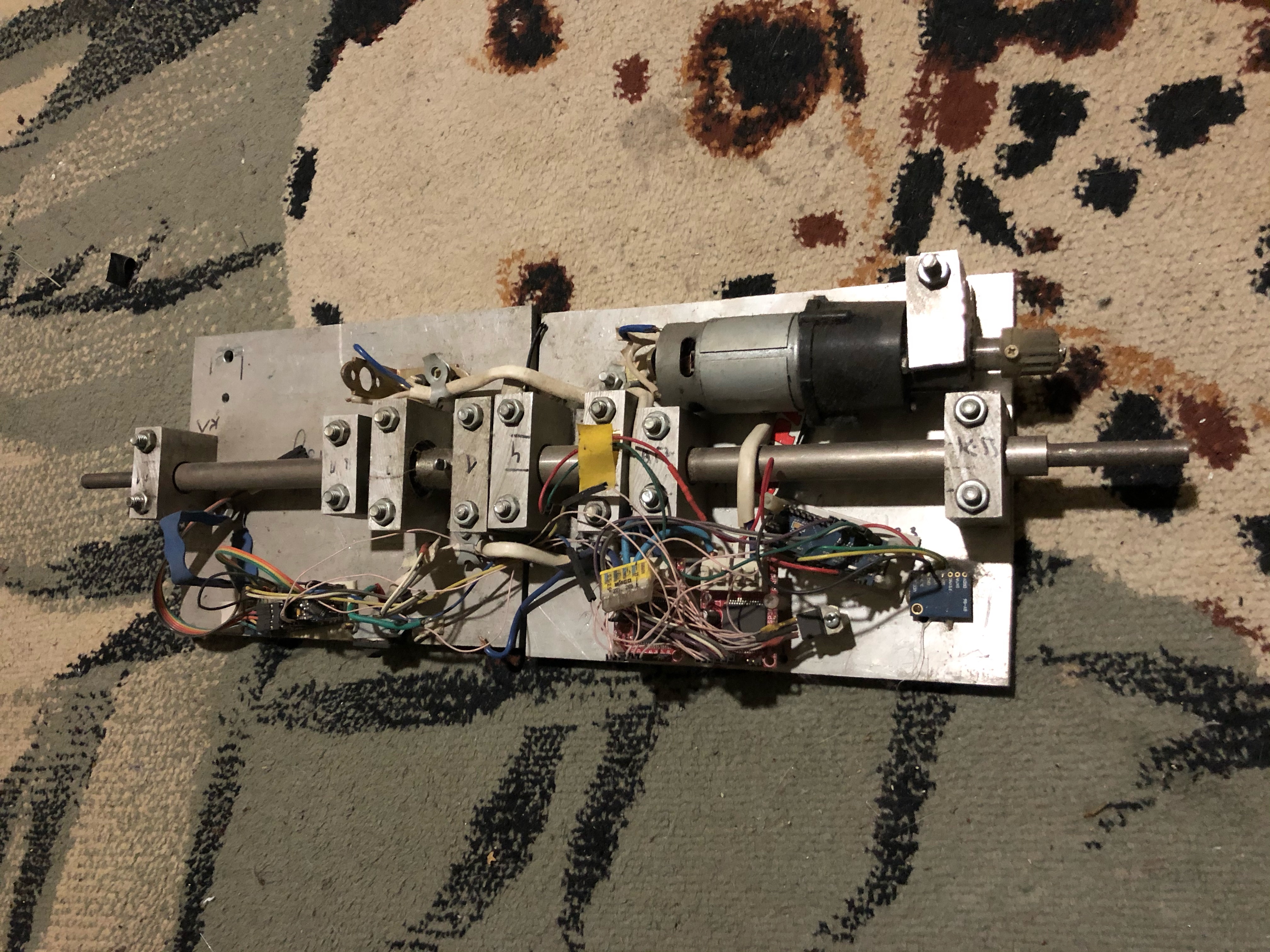
Después de un breve retraso, la plataforma de prueba fue abofeteada:
Espesor de la placa de aluminio 12 mm
Eje con un diámetro de 14 mm: una guía de una impresora matricial
Grapas de construcción diámetro 14 mm
Ruedas: parte delantera de la silla de ruedas (8 "de diámetro, cojinetes integrados).
Motores y reductores planetarios de destornilladores de 18V
Engranajes de transmisión sobre ruedas de picadoras de carne eléctricas
Batería 12V 5Ah Li-pol (se fue después de la recesión de la tendencia de construcción de quadcopter)
Driver vhn3sp30
Arduino Nano
10DOF MPU-6050 ( )
,
, .1,3,4,5,6,11 .
, , , (450 , 500 ). ? , .
( 30). vnh2SP30 eBay 600, , vnh3SP30 « » (, ) .
. , , , .
: 0,5 . ( ). – . , , . 20 .
, « – » . 5:1. 1:25. 12 8 ( 5-8/). .
! vnh2 14.
.
, . , , , , , , .
()
, , , « ». , . 6 ( 12) ( 80).
, (). , .
( 17 23). , . . ( , , ). , .. (.. ).
, ( ). , , , .
: , . 16 , ( ) . . (6 .) , , .
22,5. , .
. . « ». . - . .

, , . , . ,
( \; __)
+5 : =5 =5. -5 (.. ) =5-(-5)=10; =5+(-5)=0. - .
( __; )
0 () : =0 =0. +5 ( ) =0+(-5)=-5; =5-(-5)=5. – .
( )
, ( ).
, Arduino . analogRead ( ), .. .
.
, , . «» ( ) . .
, , ( 3 ), . .. , . , .

, .
(204) . , . , , 5 . .
, , .
, . , . ( 1,5-3 - ) . , ( ). - 135…125.
– . , , «» .
5 . .
...
... y la invaluable experiencia de levantarse de la motivación del sofá!
Eso es todo. ¡Todo bien!