Saludos, en este artículo aprenderá: cómo hacer un sensor de movimiento usando un diodo IR y un receptor IR en un STM32 con un uso mínimo del núcleo (es decir, con carga máxima en la periferia) en los registros, usando temporizadores.

El artículo analiza los problemas de programación con el mayor detalle posible. El material está diseñado para el nivel de formación principiante, pero también es adecuado para los más experimentados. Algunos de los detalles están ocultos bajo spoilers para reducir la carga del artículo.
Tabla de contenido:
Funcionamiento del diodo IR y del receptor IR
Código del transmisor de infrarrojos
Código del receptor de infrarrojos
El panorama
Se utilizan dos dispositivos: un transmisor de señal IR y un receptor de señal IR.
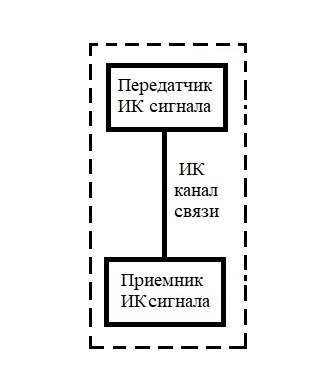
El principio general de funcionamiento es el siguiente: un transmisor de señales de infrarrojos emite una señal en el rango de longitud de onda de infrarrojos y un receptor de señales de infrarrojos las recibe. Se forma un "haz" entre estos dispositivos, cuya intersección por cualquier objeto es fijada por el dispositivo receptor.
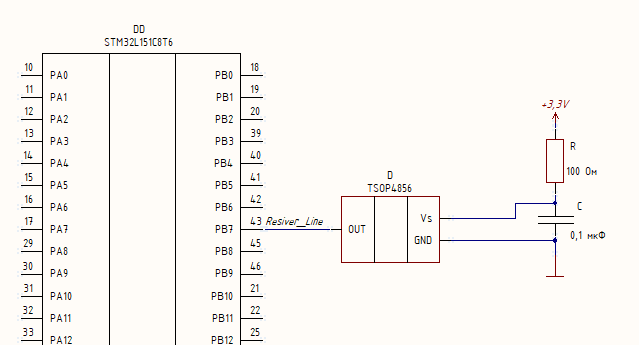
TSAL6200 se usa como diodo IR y TSOP4856 se usa como receptor IR.
 |  |
Diagramas de dispositivos
.
STM32L151C8T6, 2N7002, 1 TSAL6200. .
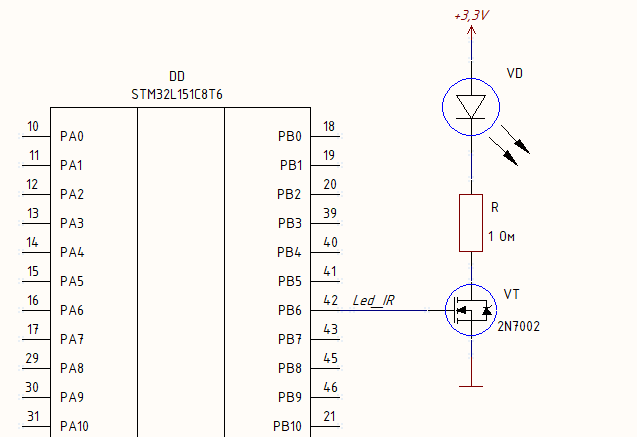
, , ( STM32L151C8T6 25 , TSAL6200 100 ).
. 2N7002, . (Gate Threshold Voltage), , 3.3 .
, , , . 1 , 20 , 14 ( , , ). , , , -.
STM32L151C8T6, TSOP4856, 100 0.1 . .
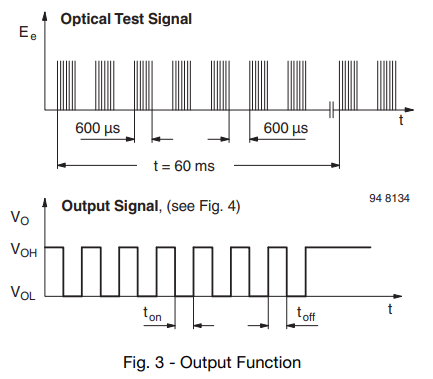
TSAL6200 940 . 56 ( , . ). .
TSOP4856. , , , . . . .
.
. , , - .
. , - ( ) General-purpose . PB6, TIM4. PB7, TIM4.

: TIM4 56 , TIM2 TIM4, .. . TIM2 Master, TIM4 – Slave. TIM2? .
Tim_Init_Transmitter(). . , main , .
#include "main.h"
void Timer_Init_Transmitter(void);
int main(void)
{
RCC->ICSCR |= RCC_ICSCR_MSIRANGE_6; // MSI 4.194 MHz enable
Timer_Init_Transmitter();
while(1)
{
}
}
void Timer_Init_Transmitter(void)
{
}
RCC->ICSCR |= RCCICSCRMSIRANGE_6 - 4.194 . .
. , , ( ), . .
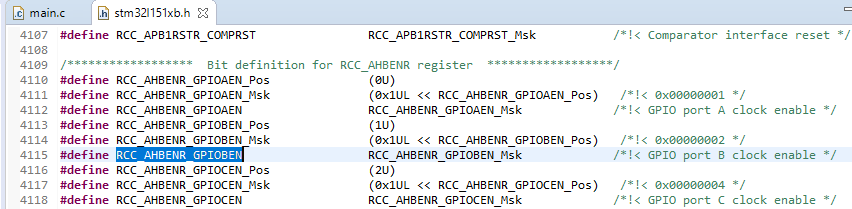
RCC_AHBENR. «1» GPIOBEN.
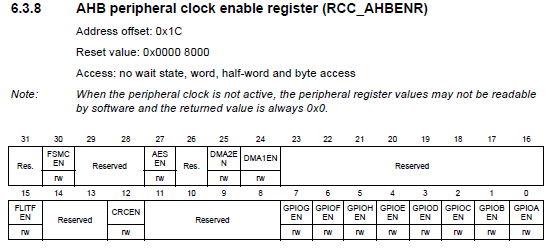
CMSIS RCC_AHBENR_GPIOBEN, .
AHBENR :
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; //GPIO port B clock enable
GPIOx_MODER. «10» MODER6 ( PB6).
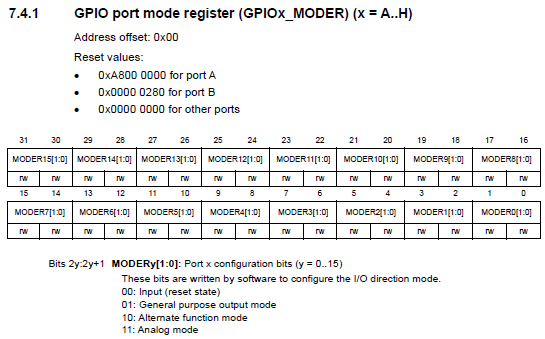
CMSIS GPIO_MODER_MODER6_1, .
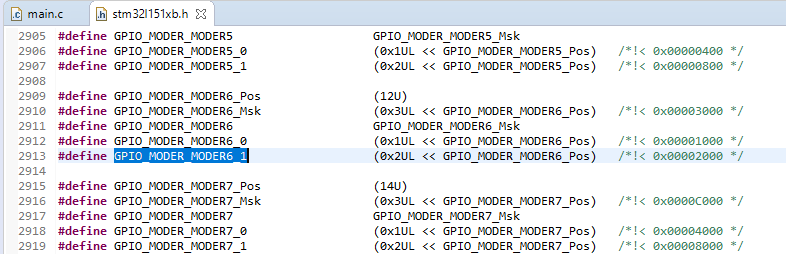
.
MODER :
GPIOB->MODER |= GPIO_MODER_MODER6_1; //Alternative function mode enable
.
.
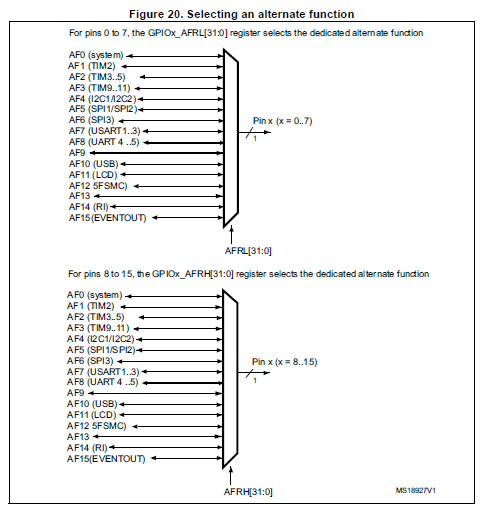
TIM4 – AF2.
, : GPIOx_AFRL 0 7 GPIOx_AFRH 8 15. , CMSIS AFR[2], «0», , «1», .
GPIOx_AFRL.
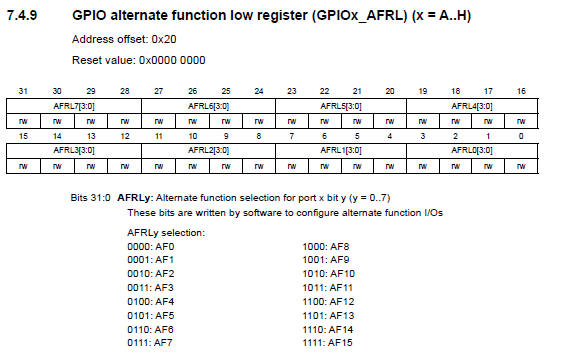
«0010» AFRL6, 0x2000000, «2» PB6, 0 5.
AFRL :
GPIOB->AFR[0] |= 0x2000000; //Pin PB6 TIM4 alternative function AF2 enable
:
void Timer_Init_Transmitter (void)
{
//Settings for GPIO PB6
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; //GPIO port B clock enable
GPIOB->MODER |= GPIO_MODER_MODER6_1; //Alternative function mode enable
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR6_1; //High speed
GPIOB->AFR[0] |= 0x2000000; //Pin PB6 TIM4 alternative function AF2 enable
}
TIM4.
PSC ( ), CCR1 ( ) ARR ( ), , TIM2, Slave PB6.
GPIO.
PSC CCR1 ARR
0, .
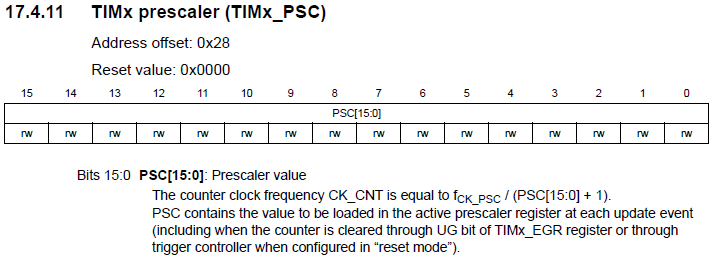
PSC :
TIM4->PSC = 0; //Prescaler value
ARR.
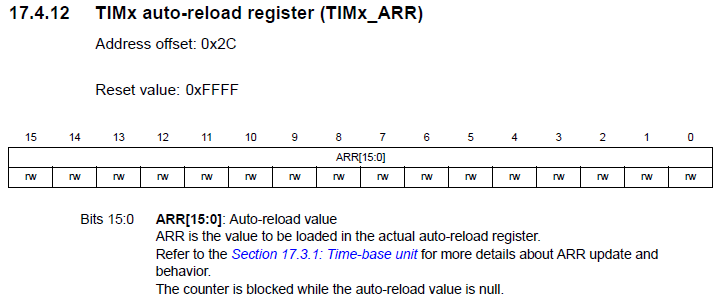
ARR 4.194 ( ) 56 . 74,89, . 75. ARR:
TIM4->ARR = 75 //Auto-reload value
CCR1.
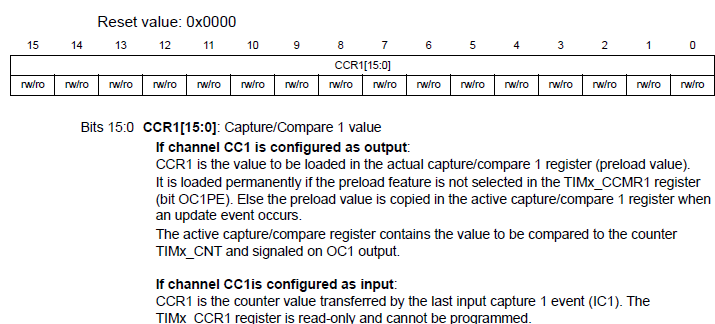
, CCR1 ARR:
TIM4->CCR1 = 37; //Capture/Compare 1 value
, CCMR1. OC1M. .
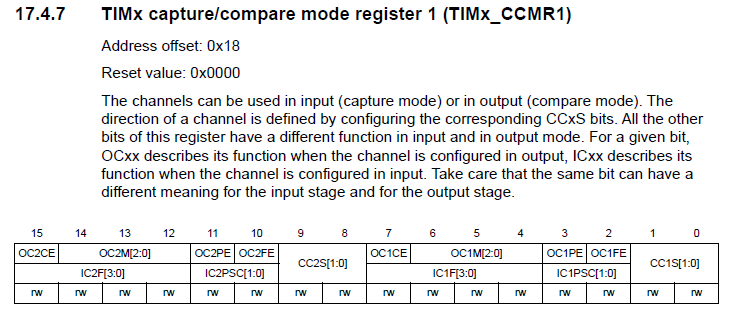
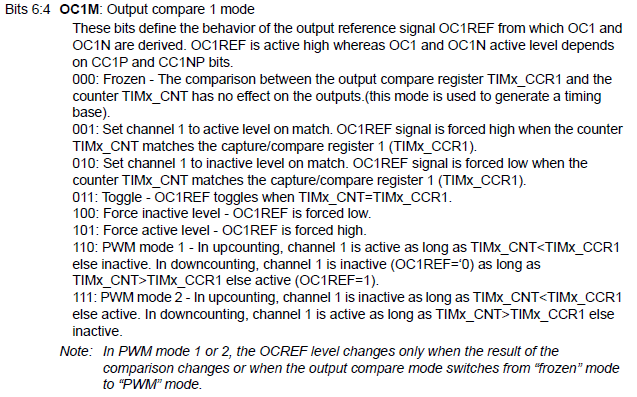
PMW mode 1, , .. «110»:
TIM4->CCMR1 |= TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2; //Output compare PMW mode 1
PB6
CCER CC1E «1», .
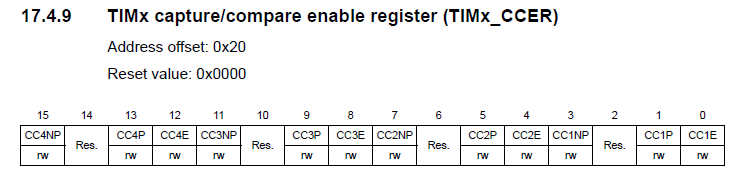
:
TIM4->CCER |= TIM_CCER_CC1E; //OC3 signal is output on the corresponding pin
Slave
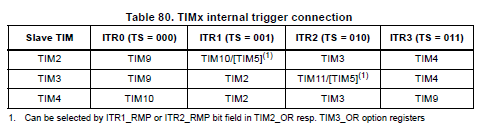
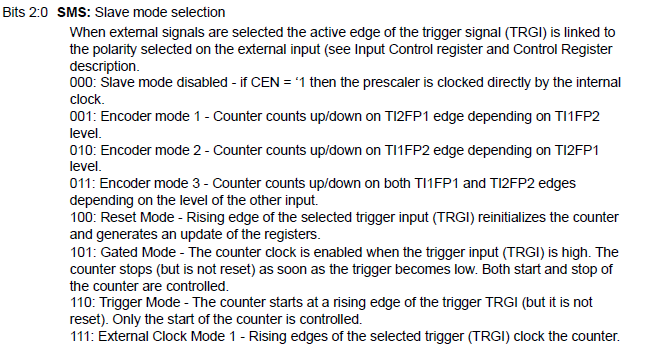
TIM4 TIM2 ITR1. TS TIMx_SMCR «001». Slave, «101» SMS. ITR1 , TIM4 , ITR1 , TIM4 .
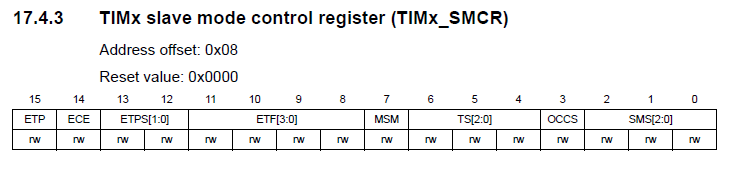
:
TIM4->SMCR |= TIM_SMCR_TS_0; //choosing ITR1
TIM4->SMCR |= TIM_SMCR_SMS_0 | TIM_SMCR_SMS_2; //Gated Mode
, :
void Timer_Init_Transmitter (void)
{
//Settings for GPIO PB6
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; //GPIO port B clock enable
GPIOB->MODER |= GPIO_MODER_MODER6_1; //Alternative function mode enable
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR6_1; //High speed
GPIOB->AFR[0] |= 0x2000000; //Pin PB6 TIM4 alternative function AF2 enable
//Settings for TIM4 - Slave
RCC->APB1ENR |= RCC_APB1ENR_TIM4EN; //TIM4 clock enable
TIM4->PSC = 0; //Prescaler value
TIM4->ARR = 75; //Auto-reload value
TIM4->CCR1 = 37; //Capture/Compare 1 value
TIM4->CCMR1 |= TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2; //Output compare PMW mode 1 enable
TIM4->CCER |= TIM_CCER_CC1E; //OC3 signal is output on the corresponding output pin
TIM4->SMCR |= TIM_SMCR_TS_0; //choosing ITR1
TIM4->SMCR |= TIM_SMCR_SMS_0 | TIM_SMCR_SMS_2; //Gated Mode
TIM4->CR1 |= TIM_CR1_CEN; //TIM4 enable
}
TIM4 , , TIM2, .
TIM2.
, PSC, CCR1 ARR, , ( TIM4) .
, TIM4.
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN; //TIM2 clock enable
PSC, CCR1 ARR TIM2
10 ( , ), TIM2 , TIM4.
«+1», .. PSC «9», 10 , .
TIM2->PSC = 9; //Prescaler value
CCR1: 10 , , ARR TIM4 ( , 75) 10, .. 750, , , 10, .. 750 10, 75 ( TIM4, ). CCR1 TIM2.
TIM2->CCR1 = 75; //Capture/Compare 1 value
ARR: , , «» 11.2, 2 ( , 1 4194000/1000 = 4194 , 2, 8400, 10, 840 ), 75 11.2 840, , . ARR.
TIM2->ARR = 840; //Auto-reload value
2, , . 4.
TIM2 , TIM4 - .
TIM2->CCMR1 |= TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2; //Output compare PMW mode 1 enable
TIM2 ( TIM4)
TIMx_CR2.
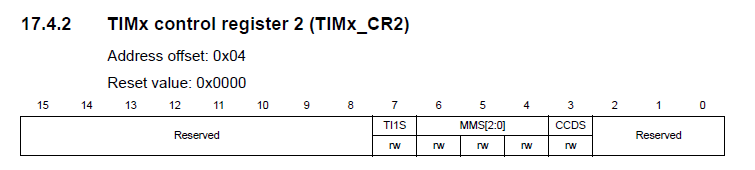
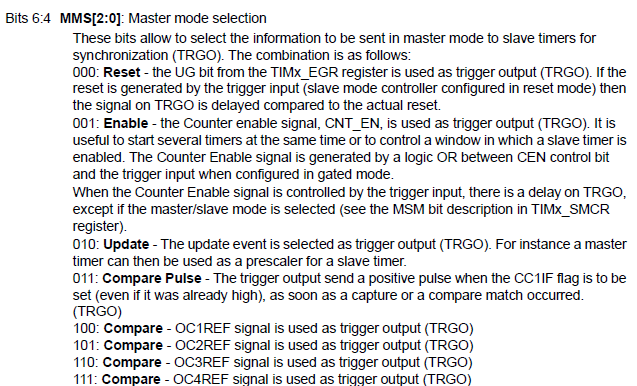
( CCR1), TIM2. OC1REF. – «100».
MMS «1» .
TIM2->CR2 |= TIM_CR2_MMS_2; //OC1REF signal is used as trigger output (TRGO)
TIM2, :
TIM2->CR1 |= TIM_CR1_CEN; //TIM2 enable
, . , , TIM2.
:
void Timer_Init_Transmitter (void)
{
//Settings for GPIO PB6
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; //GPIO port B clock enable
GPIOB->MODER |= GPIO_MODER_MODER6_1; //Alternative function mode enable
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR6_1; //High speed
GPIOB->AFR[0] |= 0x2000000; //Pin PB6 TIM4 alternative function AF2 enable
//Settings for TIM4 - Slave
RCC->APB1ENR |= RCC_APB1ENR_TIM4EN; //TIM4 clock enable
TIM4->PSC = 0; //Prescaler value
TIM4->ARR = 75; //Auto-reload value
TIM4->CCR1 = 37; //Capture/Compare 1 value
TIM4->CCMR1 |= TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2; //Output compare PMW mode 1 enable
TIM4->CCER |= TIM_CCER_CC1E; //OC3 signal is output on the corresponding output pin
TIM4->SMCR &= ~TIM_SMCR_TS; //clear bits
TIM4->SMCR |= TIM_SMCR_TS_0; //choosing ITR1
TIM4->SMCR &= ~TIM_SMCR_SMS; //clear bits
TIM4->SMCR |= TIM_SMCR_SMS_0 | TIM_SMCR_SMS_2; //Gated Mode
TIM4->CR1 |= TIM_CR1_CEN; //TIM4 enable
//Settings for TIM2 - Master
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN; //TIM2 clock enable
TIM2->PSC = 9; //Prescaler value
TIM2->ARR = 840; //Auto-reload value
TIM2->CCR1 = 75; //Capture/Compare 1 value
TIM2->CCMR1 |= TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2; //Output compare PMW mode 1 enable
TIM2->CR2 |= TIM_CR2_MMS_2; //OC1REF signal is used as trigger output (TRGO)
TIM2->CR1 |= TIM_CR1_CEN; //TIM2 enable
}
10 , 56 , 11.2, .. 2 . , - , .. . , 2 .
, . STM32 Master Slave, Master/Slave, .. .
« » PB7 . . . TIM4.
.
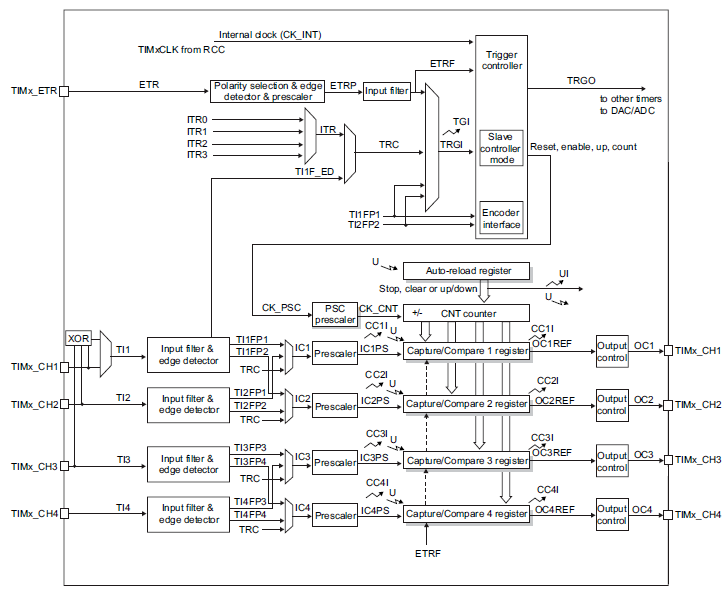
, , TRGI, Trigger controller.
: , , 5 , , ARR , 5 , .. 840 * 5 = 4200. , . ARR , , 5 , , - . . TIM4.
:
#iclude "main.h"
void Timer_Init_Receiver(void);
int main(void)
{
RCC->ICSCR |= RCC_ICSCR_MSIRANGE_6; // MSI 4.194 MHz enable
Timer_Init_Receiver();
while(1)
{
}
}
void Timer_Init_Receiver(void)
{
}
PB7: B, , . , .
void Timer_Init_Receiver(void)
{
//Settings for GPIO PB7
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; // GPIO port B clock enable
GPIOB->MODER |= GPIO_MODER_MODER7_1; // Alternative function mode enable
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR7_1; // High speed
GPIOB->PUPDR |= GPIO_PUPDR_PUPDR7_0; // pull-up PB7
GPIOB->AFR[0] |= 0x20000000; // Pin PB7 TIM4 alternative function AF2 enable
}
, , , «2» . :
GPIOB->PUPDR |= GPIO_PUPDR_PUPDR7_0;
TIM4.
. , CCR2. 9, TIM2 . CCR2 ARR. , 4200.
RCC->APB1ENR |= RCC_APB1ENR_TIM4EN; // TIM4 clock enable
TIM4->PSC = 9; // Prescaler value
TIM4->ARR = 4200; // Auto-reload value
TIM4->CCR2 = 4200; // Capture/Compare 2 value
.
, , . TIMx_CCMR1 OC2M «000», Frozen mode. , :
TIM4->CCMR1 &= ~TIM_CCMR1_OC2M; // Frozen mode enable
, CC2S ( ), :
TIM4->CCMR1 &= ~TIM_CCMR1_CC2S; // Output mode
(. ). , PB7 TIM4, TI2FP2. TIMx_CH2 TRGI. , TIMx_SMCR TS «110». Slave: Reset mode, «100» SMS. :
TIM4->SMCR |= TIM_SMCR_TS_1 | TIM_SMCR_TS_2; // Choosing TI2FP2
TIM4->SMCR |= TIM_SMCR_SMS_2; // Reset mode
, : ( , , , ). CCER: CC2P CC2NP, , .
«1» CC2P «0» CC2NP. :
TIM4->CCER &= ~TIM_CCER_CC2NP; // This bit is used in conjunction with CC2P.
TIM4->CCER |= TIM_CCER_CC2P; // Inverted/falling edge
. TIMx_DIER CC2IE «1».
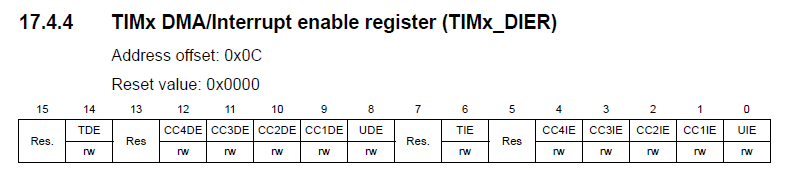
:
TIM4->DIER |= TIM_DIER_CC2IE; // Capture/Compare 2 interrupt enable
:
TIM4->CR1 |= TIM_CR1_CEN; // TIM4 enable
:
NVIC_EnableIRQ(TIM4_IRQn); // TIM4 global Interrupt enable
:
void Timer_Init_Receiver(void)
{
//Settings for GPIO PB7
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; // GPIO port B clock enable
GPIOB->MODER |= GPIO_MODER_MODER7_1; // Alternative function mode enable
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR7_1; // High speed
GPIOB->PUPDR |= GPIO_PUPDR_PUPDR7_0; // pull-up PB7
GPIOB->AFR[0] |= 0x20000000; // Pin PB7 TIM4 alternative function AF2 enable
//Settings for TIM4
RCC->APB1ENR |= RCC_APB1ENR_TIM4EN; // TIM4 clock enable
TIM4->PSC = 9; // Prescaler value
TIM4->ARR = 4200; // Auto-reload value
TIM4->CCR2 = 4200; // Capture/Compare 2 value
TIM4->CCMR1 &= ~TIM_CCMR1_OC2M; // Frozen mode enable
TIM4->CCMR1 &= ~TIM_CCMR1_CC2S; // Output mode
TIM4->CCER &= ~TIM_CCER_CC2NP; // This bit is used in conjunction with CC2P.
TIM4->CCER |= TIM_CCER_CC2P; // Inverted/falling edge
TIM4->SMCR |= TIM_SMCR_TS_1 | TIM_SMCR_TS_2; // Choosing TI2FP2
TIM4->SMCR |= TIM_SMCR_SMS_2; // Reset mode
TIM4->DIER |= TIM_DIER_CC2IE; // Capture/Compare 2 interrupt enable
TIM4->CR1 |= TIM_CR1_CEN; // TIM4 enable
NVIC_EnableIRQ(TIM4_IRQn); // TIM4 global Interrupt enable
}
:
, TIMx_SR:
TIM4->SR &= ~TIM_SR_CC2IF;
, . - , . . PB15 , :
GPIOB->MODER |= GPIO_MODER_MODER15_0; // PB15 output mode
:
void TIM4_IRQHandler(void)
{
TIM4->SR &= ~TIM_SR_CC2IF;
GPIOB->ODR |= GPIO_ODR_ODR_15; // Led red on
}
! - , .
void Timer_Init_Transmitter(void);
int main(void)
{
RCC->ICSCR |= RCC_ICSCR_MSIRANGE_6; // MSI 4.194 MHz enable
Timer_Init_Transmitter();
while(1)
{
}
}
void Timer_Init_Transmitter(void)
{
//Settings for GPIO PB6
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; //GPIO port B clock enable
GPIOB->MODER |= GPIO_MODER_MODER6_1; //Alternative function mode enable
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR6_1; //High speed
GPIOB->AFR[0] |= 0x2000000; //Pin PB6 TIM4 alternative function AF2 enable
//Settings for TIM4 - Slave
RCC->APB1ENR |= RCC_APB1ENR_TIM4EN; //TIM4 clock enable
TIM4->PSC = 0; //Prescaler value
TIM4->ARR = 75; //Auto-reload value
TIM4->CCR1 = 37; //Capture/Compare 1 value
TIM4->CCMR1 |= TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2; //Output compare PMW mode 1 enable
TIM4->CCER |= TIM_CCER_CC1E; //OC3 signal is output on the corresponding output pin
TIM4->SMCR &= ~TIM_SMCR_TS; //clear bits
TIM4->SMCR |= TIM_SMCR_TS_0; //choosing ITR1
TIM4->SMCR &= ~TIM_SMCR_SMS; //clear bits
TIM4->SMCR |= TIM_SMCR_SMS_0 | TIM_SMCR_SMS_2; //Gated Mode
TIM4->CR1 |= TIM_CR1_CEN; //TIM4 enable
//Settings for TIM2 - Master
RCC->APB1ENR |= RCC_APB1ENR_TIM2EN; //TIM2 clock enable
TIM2->PSC = 9; //Prescaler value
TIM2->ARR = 840; //Auto-reload value
TIM2->CCR1 = 75; //Capture/Compare 1 value
TIM2->CCMR1 |= TIM_CCMR1_OC1M_1 | TIM_CCMR1_OC1M_2; //Output compare PMW mode 1 enable
TIM2->CR2 |= TIM_CR2_MMS_2; //OC1REF signal is used as trigger output (TRGO)
TIM2->CR1 |= TIM_CR1_CEN; //TIM2 enable
}
#include “main.h”
void Timer_Init_Receiver(void);
int main(void)
{
RCC->ICSCR |= RCC_ICSCR_MSIRANGE_6; // MSI 4.194 MHz enable
GPIOB->MODER |= GPIO_MODER_MODER15_0; // PB15 output mode
Timer_Init_Receiver();
while(1)
{
}
}
void Timer_Init_Receiver(void)
{
//Settings for GPIO PB7
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; // GPIO port B clock enable
GPIOB->MODER |= GPIO_MODER_MODER7_1; // Alternative function mode enable
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR7_1; // High speed
GPIOB->PUPDR |= GPIO_PUPDR_PUPDR7_0; // pull-up PB7
GPIOB->AFR[0] |= 0x20000000; // Pin PB7 TIM4 alternative function AF2 enable
//Settings for TIM4
RCC->APB1ENR |= RCC_APB1ENR_TIM4EN; // TIM4 clock enable
TIM4->PSC = 9; // Prescaler value
TIM4->ARR = 4200; // Auto-reload value
TIM4->CCR2 = 4200; // Capture/Compare 2 value
TIM4->CCMR1 &= ~TIM_CCMR1_OC2M; // Frozen mode enable
TIM4->CCMR1 &= ~TIM_CCMR1_CC2S; // Output mode
TIM4->CCER &= ~TIM_CCER_CC2NP; // This bit is used in conjunction with CC2P.
TIM4->CCER |= TIM_CCER_CC2P; // Inverted/falling edge
TIM4->SMCR |= TIM_SMCR_TS_1 | TIM_SMCR_TS_2; // Choosing TI2FP2
TIM4->SMCR |= TIM_SMCR_SMS_2; // Reset mode
TIM4->DIER |= TIM_DIER_CC2IE; // Capture/Compare 2 interrupt enable
TIM4->CR1 |= TIM_CR1_CEN; // TIM4 enable
NVIC_EnableIRQ(TIM4_IRQn); // TIM4 global Interrupt enable
}
void TIM4_IRQHandler(void)
{
TIM4->SR &= ~TIM_SR_CC2IF;
GPIOB->ODR |= GPIO_ODR_ODR_15; // Led red on
}
, , , , , .
, , "" :
int StatusDiode = 0; // 0 - diode is off, 1 - diode is on
: .
, :
TIM4->DIER |= TIM_DIER_TIE; // Trigger interrupt enable
: .
, , , , , , ( ) .
, : , , , .
, , , , ( CNT), , .
:
void TIM4_IRQHandler(void)
{
if (StatusDiode == 0)
{
TIM4->SR &= ~TIM_SR_TIF;
GPIOB->ODR |= GPIO_ODR_ODR_15; // Led red on
TIM4->DIER &= ~TIM_DIER_TIE; // Trigger interrupt disable
TIM4->DIER |= TIM_DIER_CC2IE; // Capture/Compare 2 interrupt enable
TIM4->CNT = 0;
StatusDiode = 1;
}
else
{
TIM4->SR &= ~TIM_SR_CC2IF;
GPIOB->ODR &= ~GPIO_ODR_ODR_15; // Led red off
TIM4->DIER &= ~TIM_DIER_CC2IE; // Capture/Compare 2 interrupt disable
TIM4->DIER |= TIM_DIER_TIE; // Trigger interrupt enable
StatusDiode = 0;
}
}
#include “main.h”
void Timer_Init_Receiver(void);
int main(void)
{
RCC->ICSCR |= RCC_ICSCR_MSIRANGE_6; // MSI 4.194 MHz enable
GPIOB->MODER |= GPIO_MODER_MODER15_0; // PB15 output mode
Timer_Init_Receiver();
while(1)
{
}
}
void Timer_Init_Receiver(void)
{
//Settings for GPIO PB7
RCC->AHBENR |= RCC_AHBENR_GPIOBEN; // GPIO port B clock enable
GPIOB->MODER |= GPIO_MODER_MODER7_1; // Alternative function mode enable
GPIOB->OSPEEDR |= GPIO_OSPEEDER_OSPEEDR7_1; // High speed
GPIOB->PUPDR |= GPIO_PUPDR_PUPDR7_0; // pull-up PB7
GPIOB->AFR[0] |= 0x20000000; // Pin PB7 TIM4 alternative function AF2 enable
//Settings for TIM4
RCC->APB1ENR |= RCC_APB1ENR_TIM4EN; // TIM4 clock enable
TIM4->PSC = 9; // Prescaler value
TIM4->ARR = 4200; // Auto-reload value
TIM4->CCR2 = 4200; // Capture/Compare 2 value
TIM4->CCMR1 &= ~TIM_CCMR1_OC2M; // Frozen mode enable
TIM4->CCMR1 &= ~TIM_CCMR1_CC2S; // Output mode
TIM4->CCER &= ~TIM_CCER_CC2NP; // This bit is used in conjunction with CC2P.
TIM4->CCER |= TIM_CCER_CC2P; // Inverted/falling edge
TIM4->SMCR |= TIM_SMCR_TS_1 | TIM_SMCR_TS_2; // Choosing TI2FP2
TIM4->SMCR |= TIM_SMCR_SMS_2; // Reset mode
TIM4->DIER |= TIM_DIER_TIE; // Trigger interrupt enable
TIM4->CR1 |= TIM_CR1_CEN; // TIM4 enable
NVIC_EnableIRQ(TIM4_IRQn); // TIM4 global Interrupt enable
}
void TIM4_IRQHandler(void)
{
if (StatusDiode == 0)
{
TIM4->SR &= ~TIM_SR_TIF;
GPIOB->ODR |= GPIO_ODR_ODR_15; // Led red on
TIM4->DIER &= ~TIM_DIER_TIE; // Trigger interrupt disable
TIM4->DIER |= TIM_DIER_CC2IE; // Capture/Compare 2 interrupt enable
TIM4->CNT = 0;
StatusDiode = 1;
}
else
{
TIM4->SR &= ~TIM_SR_CC2IF;
GPIOB->ODR &= ~GPIO_ODR_ODR_15; // Led red off
TIM4->DIER &= ~TIM_DIER_CC2IE; // Capture/Compare 2 interrupt disable
TIM4->DIER |= TIM_DIER_TIE; // Trigger interrupt enable
StatusDiode = 0;
}
}
, , - . , , , . .