
La piel no solo es el órgano más grande de nuestro cuerpo, sino también el sistema sensorial más grande que recopila información cada segundo sobre los estímulos externos y los niveles de su impacto en nuestro cuerpo. Desde un punto de vista mecánico, la reconstrucción de la piel humana no es tan difícil, pero solo será una capa protectora artificial, desprovista de actividad neuronal. Científicos de la Royal University of Technology de Melbourne (Melbourne, Australia) han desarrollado un sistema de sensores artificiales que imitan varios sensores de piel humana. ¿Qué se requirió para crear una imitación tan compleja, cuál es el principio de funcionamiento del dispositivo, qué estímulos es capaz de percibir y dónde se puede aplicar este desarrollo? Encontraremos respuestas a estas y otras preguntas en el informe de los científicos. Vamos.
Base de investigación
El sistema sensorial de la piel humana se puede dividir en varios subsistemas, cada uno de los cuales es responsable de determinados estímulos. Se considera que los receptores más comunes e importantes son los receptores de presión (corpúsculos de Pacini), la temperatura (termorreceptores) y los receptores del dolor (nociceptores).
Cada uno de estos receptores recopila información y transmite señales al cerebro humano para procesar y tomar las decisiones adecuadas. Otros sistemas sensoriales (visión, audición, gusto, olfato) tienen un principio de funcionamiento similar.
Es lógico que un sistema biológico de este tipo sea extremadamente difícil de reproducir, incluso si se tienen en cuenta los sensores táctiles modernos y CMOS (estructura complementaria de semiconductores de óxido de metal).
Hay desarrollos que implementan un nociceptor artificial basado en un memristor de difusión *, que puede presentar un estado normal consistente en una etapa de tensión y relajación del nociceptor, así como un estado anormal con alodinia * e hiperalgesia * del nociceptor utilizando estímulos externos como tensión.
Memristor * es un elemento pasivo en microelectrónica capaz de cambiar su resistencia en función de la carga que pasa a través de él.
La alodinia * es un dolor anormal causado por un irritante que generalmente no es doloroso (como el dolor cuando se toca ligeramente).Según los científicos, estos desarrollos son extremadamente importantes, ya que el mecanismo de conmutación del memristor depende de los filamentos conductores, que tienen un diámetro aproximadamente subnanométrico. Al usar el módulo termoeléctrico y el módulo de presión piezoeléctrico, es posible lograr con éxito un estado de tensión y relajación entre las cuatro funciones principales del nociceptor.
Hiperalgesia * : una sensibilidad anormalmente alta del cuerpo a los estímulos de dolor.
Por el momento, se utiliza una técnica similar para crear un ojo artificial, pero aún no se ha logrado su implementación en el formato de piel artificial.
En este trabajo, los científicos demuestran un prototipo funcional de receptores electrónicos artificiales que imitan el pequeño cuerpo, termorreceptor y nociceptor de Pacini. Esto se logró mediante una combinación de varios componentes funcionales:
- memristor para la toma de decisiones basado en titanato de estroncio SrTiO3 (STO) con deficiencia de oxígeno;
- Sensor de presión basado en oro de elastómero extensible (polidimetilsiloxano, es decir, PDMS);
- Disparador de temperatura basado en óxido de vanadio (VO 2 ) con cambio de fase.
La principal diferencia de este concepto con los anteriores es que no hay necesidad de módulos termoeléctricos complejos y separados y sensores de presión piezoeléctricos para la implementación práctica de somatosensores. En consecuencia, el desarrollo utiliza películas delgadas de óxido extremadamente económicas y fácilmente disponibles, así como sensores de presión portátiles en PDMS biocompatible.
Resultados de la investigacion
Antes de crear cualquier cosa, debe pensar qué y cómo funcionará en la versión final. Con el objetivo de crear receptores cutáneos artificiales, se desarrolló una base hipotética para la implementación de cuerpos de Pacini funcionales, termorreceptores y nociceptores (diagrama siguiente).

Imagen # 1
Los somatosensores humanos están conectados a la médula espinal a través de los cuernos espinales (protuberancias de materia gris), que transmite información al cerebro ( 1a ). Hay formas especiales de determinar la presión (azul en 1a ) y la temperatura (rojo en 1a ).
Los cuerpos de Pacini son capas de membranas llenas de líquido. Las huellas dactilares son un excelente ejemplo del pequeño cuerpo de Pacini. Cuando se aplica presión local al cuerpo, parte del cuerpo se deforma, lo que provoca un cambio en los iones químicos (por ejemplo, sodio o potasio) y, como resultado, surge un potencial receptor en las terminaciones nerviosas de la piel. Este potencial receptor, cuando se alcanza suficiente energía (umbral), genera un impulso eléctrico dentro del corpúsculo, que viaja a través del sistema nervioso central para activar una respuesta motora a través de fibras nerviosas (azul en 1a ).
Cuando la temperatura de la piel sube por encima de los 30 ° C, el termorreceptor detecta calor y activa potenciales de acción. La frecuencia de excitación aumenta al aumentar la temperatura del estímulo hasta que alcanza el valor de saturación. Además, los nociceptores de calor que captan las señales de dolor comienzan a dispararse alrededor de los 45 ° C. Estas células se especializan en detectar quemaduras y calor nocivo.
Cuando una neurona térmica ubicada en una terminación nerviosa libre recibe un estímulo dañino, se envía una respuesta eléctrica al nociceptor para comparar si la amplitud del estímulo cruza el umbral para generar un potencial de acción y enviarlo al sistema nervioso central a través de la médula espinal (rojo en 1a ).
Para crear receptores artificiales similares, se han utilizado transductores de presión de oro y PDMS que cambian entre estados de baja resistencia (LRS) y alta resistencia (HRS) con y sin presión aplicada para simular los corpúsculos de Pacini ( 1b y 1c ).
Para imitar el comportamiento de los termorreceptores y nociceptores, se utilizó una transición de fase VO 2 , que puede pasar de HRS a temperatura ambiente a LRS a temperaturas superiores a la temperatura de transición (68 ° C).
Además, la memoria de conmutación resistiva STO (titanato de estroncio) se utilizó como elemento de toma de decisiones para evaluar los niveles de umbral.
Para un cuerpo de Pacini artificial, cuando no hay presión detectable, la corriente a través del memristor de decisión (I 1 ) es insuficiente debido al voltaje de polarización para iniciar la respuesta del motor ( 1b ). Cuando se aplica presión, el transmisor ingresa al modo HRS, bloqueando I 2 , permitiendo que la corriente máxima fluya a través del memristor. Debido al I 1 más alto , el memristor basado en STO cambia al LRS. En consecuencia, una corriente más alta fluye a través del cuerpo, provocando una reacción motora ( 1c ).
En el caso del termorreceptor y nociceptor VO 2puede exhibir un cambio en la resistencia de tres a cuatro órdenes de magnitud a la temperatura de unión. Si la temperatura está por debajo de la temperatura de la unión, entonces el VO 2 es un aislante.
Por lo tanto, una pequeña cantidad de corriente fluye a través del receptor y el voltaje que aparece en el memristor no es suficiente para encenderlo ( 1d ). Cuando se alcanza la temperatura de unión, VO 2 cambia al LRS, como resultado de lo cual aparece un mayor potencial en el memristor, lo que hace que cambie al LRS. Cuando tanto el VO 2 como el STO están en el LRS, una corriente aumentada fluye a través del receptor ( 1e ).
Cuerpo artificial de Pacini
Después de crear el concepto de un dispositivo futuro, los científicos comenzaron una implementación por fases. La primera etapa fue la creación de un cuerpo de Pacini artificial, para lo cual se utilizó un memristor basado en STO deficiente en oxígeno con una estructura de pila: Pt (100 nm) / Ti (10 nm) / STO (55 nm) / Pt (25 nm) / Ti (7 nm) y un sustrato de SiO 2 .
La capa inferior de Ti se utiliza como capa adhesiva de la capa inferior de Pt y la capa superior de Ti se utiliza como depósito de oxígeno y también como capa adhesiva de la capa superior de Pt. La capa inferior de Pt participa en el proceso de conmutación, mientras que la superior sirve como material inerte que evita que el TiO 2 se exponga al oxígeno ambiental.
La arquitectura del transductor de presión está inspirada en el corpúsculo biológico de Pacini, que tiene forma helicoidal con un ancho de vía de 100 micrones. El diámetro de toda la bobina es de 7,8 mm. Para crear un sensor, se depositó Au (200 nm) / Cr (20 nm) en un PDMS con un espesor de 300 μm.
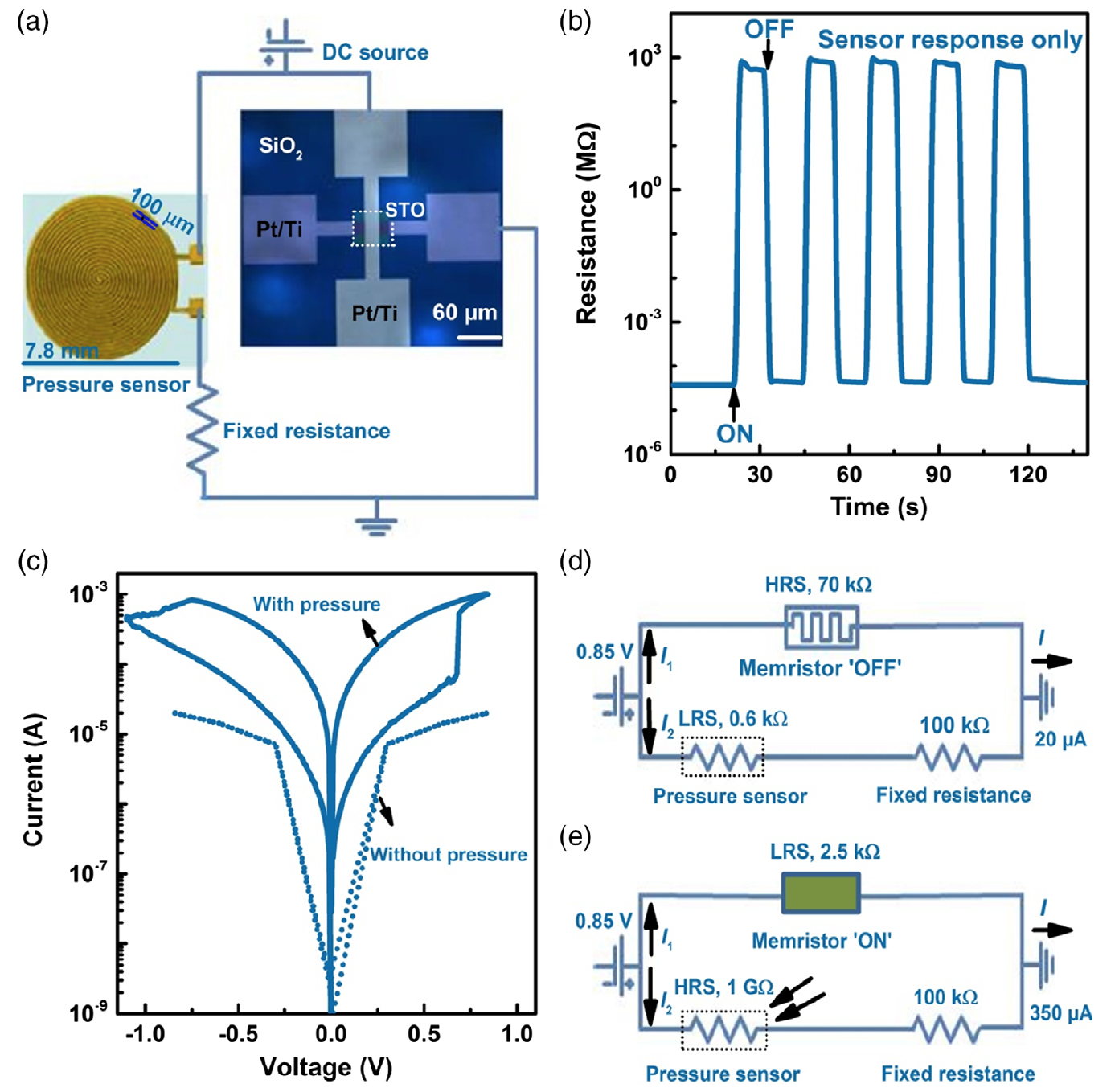
Imagen # 2 La
imagen 2a muestra un equivalente artificial de un cuerpecito con la integración de un memristor y un sensor de presión.
La red de sensores de presión funciona de tal manera que permite que el receptor active el memristor, que actúa como un componente de toma de decisiones.
En los sistemas biológicos, cuando se alcanza un potencial receptor suficiente, el componente de toma de decisiones puede crear un impulso eléctrico para activar el motor del sistema nervioso central. Para replicar esta función con un valor de umbral específico, se requiere que el sensor de presión detecte un rango específico de valores de presión. Para simplificar la demostración de la eficiencia del sistema, los científicos decidieron simplificar este punto a solo dos valores: hay una fuerte presión y no hay presión en absoluto.
Se eligió una resistencia fija de 100 kΩ para limitar la corriente a través de la red de sensores de presión, que tiene una resistencia de solo 0,6 kΩ. Esto asegura que el sistema muestre una corriente muy baja en ausencia de presión. Figura 2bmuestra la respuesta y repetibilidad de un transductor de presión autónomo.
Cuando se aplica presión, el transductor de presión entra en muy HRS con una resistencia de aproximadamente 1 GΩ debido a la deformación y las grietas, que son muy comunes con los transductores basados en PDMS. Las deformaciones y las grietas pueden degradar el rendimiento del transductor de presión después de varios ciclos, pero esto no impide la demostración del concepto de transductor artificial en sí. Cuando se libera la presión, los espacios agrietados se vuelven a cerrar, creando un LRS, lo que hace que el sensor vuelva a su estado original.
Se observa un patrón similar en los sensores biológicos, que también se deforman, lo que conduce a un cambio de iones químicos cuando se aplica presión.
Cabe señalar que el componente de decisión que consiste en el elemento de memristor STO debe electroformarse inicialmente aplicando un voltaje de polarización a una corriente muy baja de 1 μA a los electrodos superior e inferior. Esta etapa crea un canal localizado para la formación de filamentos conductores a través del STO. Entonces se requiere un barrido de voltaje para cambiar el dispositivo entre los estados HRS y LRS.
También es importante que, sin la presión aplicada, la corriente que fluye a través del memristor sea insuficiente para cambiarlo. Sin embargo, cuando se aplica presión, el sensor que contiene la rama entra en el estado HRS, lo que conduce al potencial máximo del receptor en el memristor ( 1s). Cuando se alcanza el umbral del potencial del receptor, el memristor de toma de decisiones cambia del estado HRS al estado LRS ( 2c ). En este estado, la secuencia aplicada 0 → +0,85 V → 0 → 1,12 V → 0 cambia el dispositivo al estado LRS para el ciclo positivo y al estado HRS para el semiciclo negativo ( 2d y 2e ).
Para convertir un dispositivo a LRS, solo se tiene en cuenta el semiciclo positivo. Según la imagen 2d , cuando no se aplica presión, el circuito del sensor de presión tiene una resistencia total de 100,6 kΩ, mientras que el componente de decisión en paralelo (memristor) tiene una resistencia de 70 kΩ. Por tanto, la resistencia equivalente de todo el cuerpo de Pacini es 41,2 kΩ.
Esta resistencia equivalente pasa una corriente de solo 0.02 mA a través de todo el circuito, lo que puede considerarse un estado relajado. La aplicación de presión convierte el circuito del sensor de presión en un estado de resistencia extremadamente alto de 1 GΩ, mientras que la resistencia del memristor es solo de aproximadamente 2,5 kΩ, lo que cambia la resistencia equivalente de todo el cuerpo de Pacini en aproximadamente 2,5 kΩ. Esta condición de baja impedancia permite una corriente ≥ 0,35 mA en todo el circuito.
Así, el estímulo de presión genera una señal de respuesta que es casi 18 veces mayor que en un estado relajado, lo que puede permitir que el sistema nervioso central inicie su respuesta motora. Una vez que se completa la respuesta del motor, se puede aplicar polaridad inversa al memristor utilizando electrodos no utilizados para inicializar el corpúsculo de Pacini.
Termorreceptor artificial
Para crear un termorreceptor en la base del memristor, se usó la misma estructura de pila que para el cuerpo pequeño de Pacini, es decir, metal-aislante-metal (MIM).
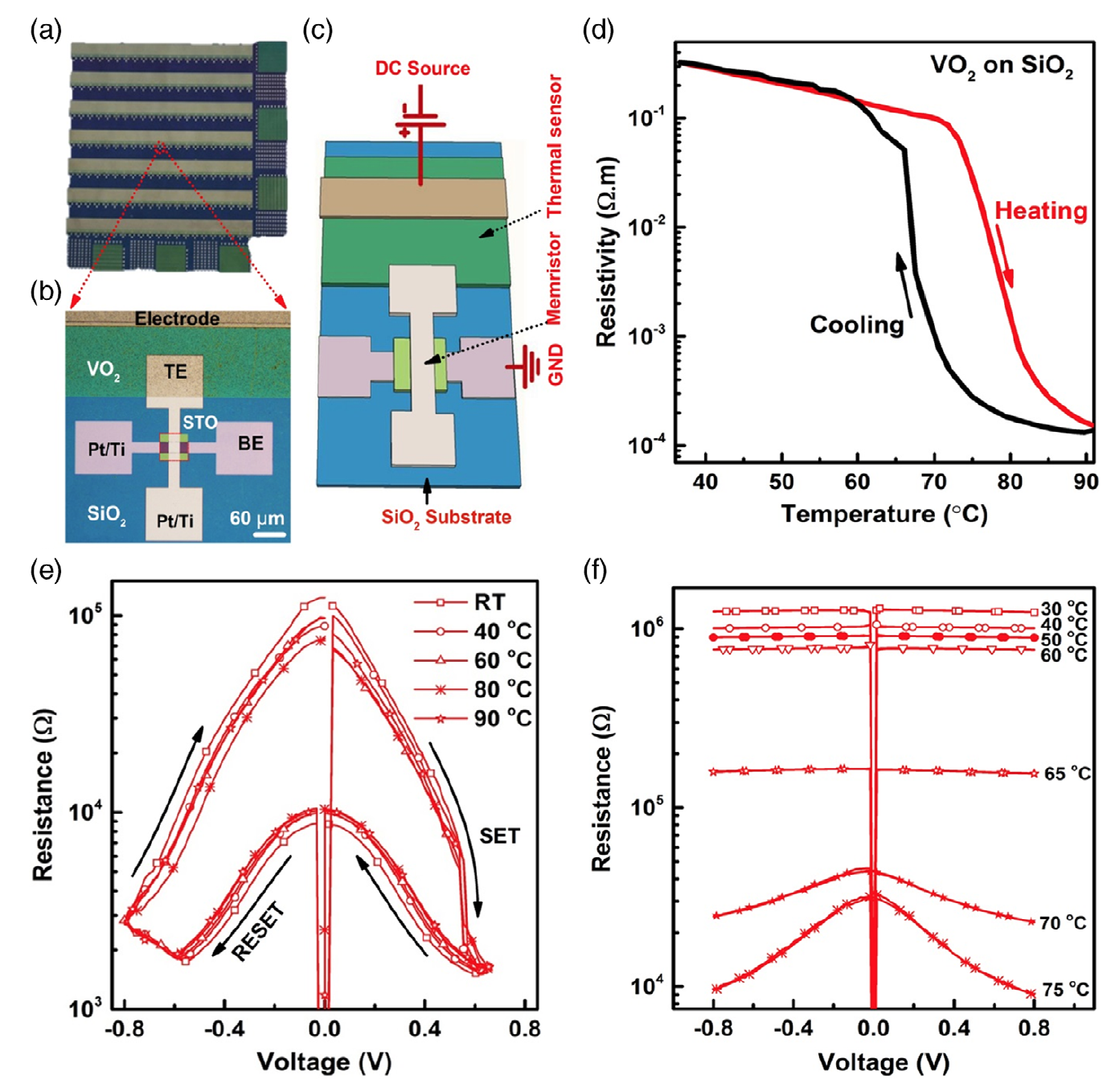
Image №3
parte superior utiliza electrones en conjunción con la superficie de VO 2 ( 3 a y 3b ) para conectar secuencialmente un sensor térmico. Para desplazar todo el dispositivo, esta capa de electrodo de Pt (100 nm) / Ti (10 nm) se depositó sobre la superficie de VO 2 . Se mantuvo una distancia sustancial de 100 µm entre el electrodo inicial y el electrodo de memristor superior.
En la imagen 3cmuestra un diagrama de conexión del termorreceptor, en el que la polarización se aplica a través del metal al sensor térmico, y la tierra (GND en el diagrama) se conecta al electrodo inferior del memristor que toma la decisión.
El gráfico 3d muestra la curva de resistencia versus temperatura para la transición dieléctrico-metal en una película delgada de VO 2 . Obviamente, cuando se alcanza la temperatura de transición, la resistividad cae cuatro órdenes de magnitud. También se observa una histéresis térmica evidente en los ciclos de calentamiento y enfriamiento. También se encontró que no hubo un efecto notable de la temperatura en la conmutación resistiva ( 3e ).
El memristor puede indicar el cambio de resistencia de 100 kOhm a 2 kOhm durante el proceso de conmutación. Sin embargo, para un análisis más claro, se decidió considerar la resistencia del estado HRS como 93 kΩ, y la resistencia del estado LRS como 9 kΩ a voltaje de lectura de 80 mV (V READ ), ya que a este voltaje se observa la relación de conmutación máxima R OFF / R ON . La secuencia de conmutación de voltaje del dispositivo fuera de línea terminado fue: 0 → +0.65 V → 0 → 0.80 V → 0.Cuando se aplica la misma secuencia a todo el termorreceptor, la resistencia disminuye y, por lo tanto, la corriente del receptor aumenta al aumentar la temperatura ( 3f ).
Para proporcionar el voltaje de conmutación requerido, la temperatura del receptor se mantuvo a 70 ° C. Esto es para asegurar que VO 2 esté en el estado LRS. Luego, la aplicación de un voltaje de polarización de 0 a 2 V establece y reinicia completamente el dispositivo ( 4a ).
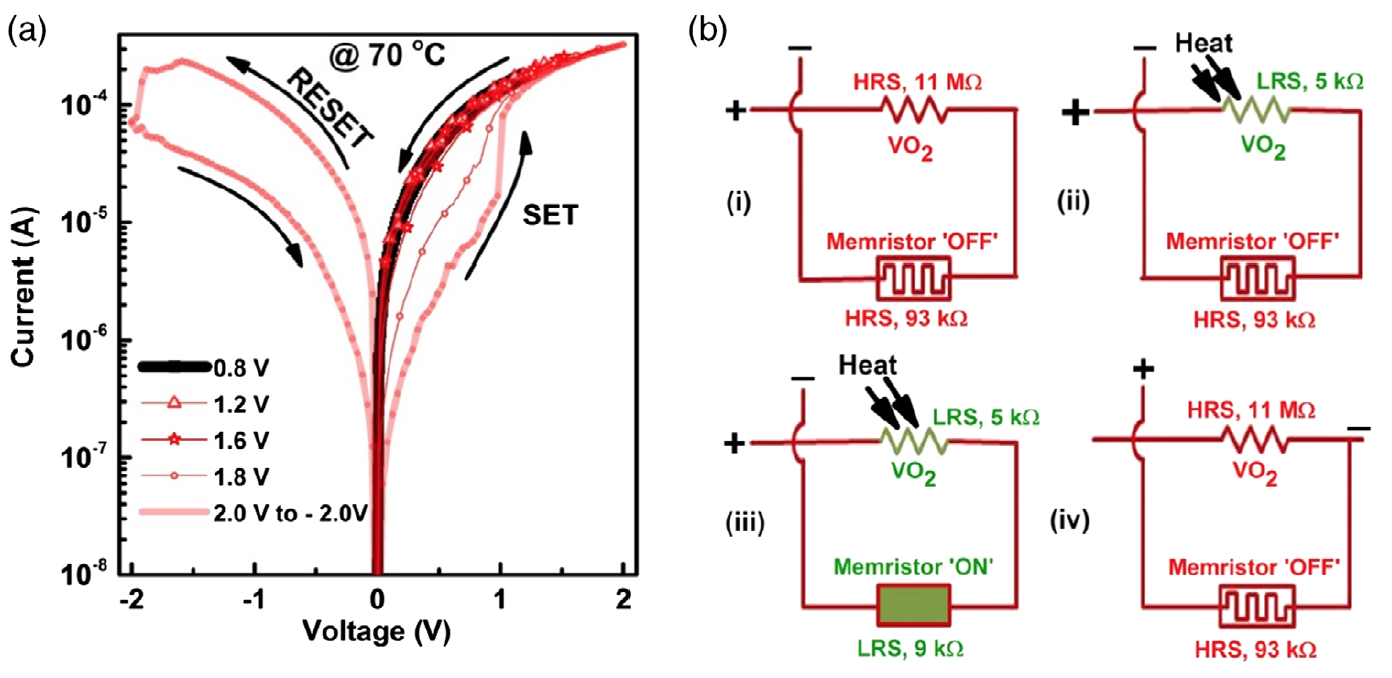
Imagen # 4
Para un memristor que toma una decisión, la resistencia inicial de 93 kΩ es mucho más baja que la HRS del sensor térmico, que es de 11 MΩ. Por lo tanto, el voltaje parcial que aparece en el memristor de decisión no puede alcanzar el umbral VSET para convertirlo de HRS a LRS. Por lo tanto, tanto el sensor térmico como el memristor están en el estado HRS, lo que permite que fluya una corriente mínima a través del termorreceptor [ 4b (i) ].
Cuando se aplica una temperatura crítica de 70 ° C, la resistencia del sensor de temperatura disminuye en cuatro órdenes de magnitud, y el voltaje parcial del memristor aumenta gradualmente hasta el voltaje SET al aumentar la respuesta del receptor [ 4b (ii) ]. Tan pronto como el VSET enciende el memristor, entra en el LRS desde el HRS con una resistencia de 9 kΩ [ 4b (iii) ].
En esta etapa, se forma la respuesta máxima del receptor. La memoria LRS persistirá durante mucho tiempo incluso si el estímulo térmico está completamente desactivado. Para reprogramar el memristor, el voltaje negativo VRESET puede transferirlo de LRS a HRS [ 4b (iv) ]. Para ello, se puede aplicar voltaje negativo desde los electrodos no utilizados ( 3c ).
Nociceptor artificial
Es seguro decir que los nociceptores son significativamente diferentes de sus contrapartes. Los nociceptores se encuentran en todo el cuerpo humano y se encuentran al final del axón de la neurona sensorial.
Para evitar la exposición a estímulos dañinos, el nociceptor responde de dos formas: normal y anormal.
En condiciones normales, cuando un nervio que termina en la piel recibe un estímulo dañino, se envía una señal de respuesta al nociceptor para comparar si la señal supera un determinado valor umbral y decidir si es necesario generar un potencial de acción para el sistema nervioso central. En este estado normal, el nociceptor se apaga lentamente durante un tiempo conocido como proceso de relajación. Al utilizar este umbral y proceso de relajación, el nociceptor aísla el cuerpo de cualquier estímulo crítico y continuo no deseado.
Una respuesta anormal ocurre cuando el cuerpo se enfrenta a estímulos cercanos al umbral de daño al nociceptor, y en este estado, el nociceptor actúa como un receptor normal para evitar un daño mayor. Si la lesión aún se recibió, aumenta la vulnerabilidad del tejido afectado. El sistema nociceptivo se adapta a esta mayor vulnerabilidad al reducir localmente el umbral nociceptivo y facilitar la respuesta nociceptiva, proporcionando así una protección tisular adecuada.
El nociceptor exhibe dos comportamientos distintos en condiciones anormales: alodinia e hiperalgesia.
La alodinia responde a un umbral más bajo, mientras que la hiperalgesia produce una respuesta más fuerte cuando se excede el umbral, lo que indica que no hay umbral de nociceptor en la condición anormal.
Para observar el comportamiento del termorreceptor artificial en condiciones normales, que actúa como nociceptor ante estímulos nocivos, se cambió el dispositivo a LRS y se leyó la lectura en V READ de 80 mV.
Dado que la respuesta del nociceptor biológico depende en gran medida de la intensidad del estímulo, el nociceptor artificial se expuso a una serie de estímulos de temperatura con intensidades variables que van desde 66 a 82 ° C ( 5a ).

Imagen # 5 El
gráfico 5b muestra la señal de respuesta relativa a la intensidad del estímulo térmico aplicado. Cabe señalar que el nociceptor no se enciende hasta que el pulso de temperatura alcanza los 68 ° C, que es la temperatura de transición del VO utilizado.2 . Por lo tanto, cuando el VO 2 pierde el LRS debido a la transición inducida por la temperatura, comienza a fluir una corriente alta a través del circuito. Tal comando se asemeja a los sistemas biológicos en los que el nociceptor genera un potencial de acción que activa el cerebro cuando la fuerza del estímulo alcanza valores por encima del valor crítico.
Un aumento adicional en la intensidad del estímulo por encima del valor umbral conduce a una mayor corriente, lo que también es consistente con la respuesta del análogo biológico: cuanto mayor es la intensidad del estímulo, mayor es la intensidad de la respuesta. El gráfico 5c muestra los estímulos de calentamiento y enfriamiento y la respuesta correspondiente a 68 ° C.
Gráfico 5dmuestra la atenuación de la señal de respuesta a lo largo del tiempo después de que se haya apagado el estímulo dañino, es decir, un proceso de relajación que está determinado por VO 2 , ya que no hay efecto de temperatura en el memristor basado en STO.
Debido a la tendencia de la resistencia del VO 2 a aumentar al disminuir la temperatura con el tiempo, el nociceptor artificial limita la corriente a través del circuito y, por lo tanto, se observa una disminución en la intensidad de las señales de respuesta.
Una respuesta más fuerte debido a estímulos más altos requiere un tiempo relativamente más largo para la relajación completa. Por ejemplo, la respuesta a 68 ° C tarda 100 s en alcanzar una corriente base de 0,5 μA, mientras que la respuesta a 80 ° C no puede relajarse por completo en 100 s.
Para observar el comportamiento del dispositivo en condiciones anormales, se aplicó un estímulo al nociceptor artificial, cuya intensidad fue mucho mayor que en condiciones normales.
El nociceptor se calentó a 90 ° C a una velocidad de 20 grados por minuto y se enfrió a 60 ° C, que está por debajo del valor umbral (68 ° C) en condiciones normales.
A esto le siguió un recalentamiento de 60 a 90 ° C, necesario para determinar la presencia / ausencia de generación de un umbral reducido y una respuesta mejorada, que son las principales propiedades de la alodinia y la hiperalgesia.
La secuencia 60 → 90 → 60 → 90 se aplicó a la porción de VO 2 del receptor y al receptor completo que contiene VO 2 y una pila de metal-aislante-metal ( 6a ).
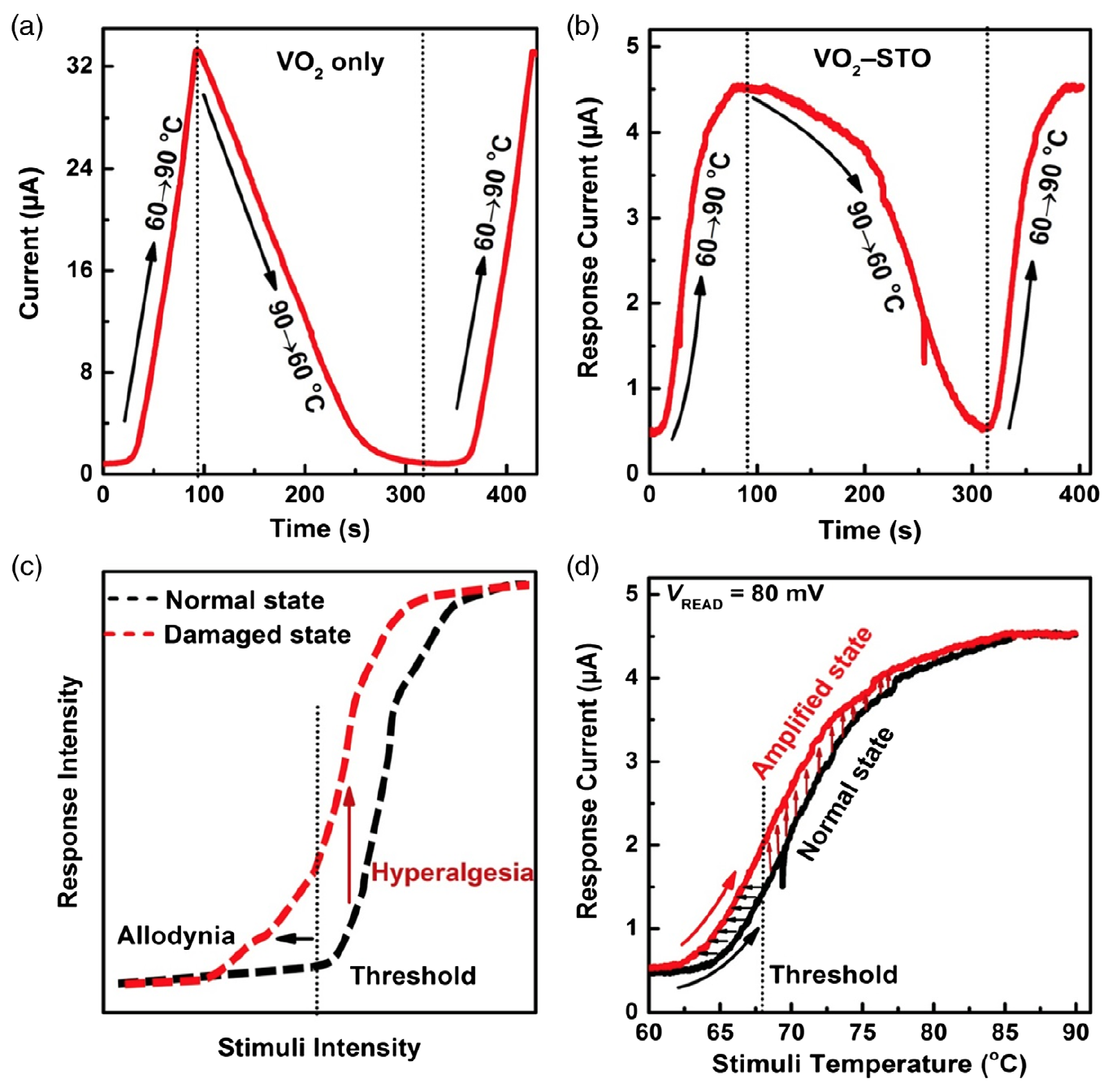
Imagen No. 6
Los gráficos muestran claramente que la señal de respuesta es mucho más lineal en VO 2 ( 6a ) en comparación con la señal de todo el nociceptor ( 6b ). Esto es de esperar, ya que a alta intensidad de estímulo, el VO 2 se encuentra en un estado casi metálico con una resistencia relativamente baja de 5 kOhm después de la transición. Además, el voltaje de polarización aplicado VREAD (80 mV) ajusta eléctricamente el VO 2 para hacerlo aún más metálico, lo que da como resultado una respuesta lineal.
Al mismo tiempo, cuando aparece una polarización V READ similar en todo el nociceptor, la caída máxima de voltaje ocurre en el memristor, que está en el estado LRS (9 kΩ). En esta etapa, el voltaje en VO2 no es suficiente para mostrar una respuesta lineal. Por tanto, este comportamiento no es lineal.
La Figura 6c muestra el comportamiento en alodinia e hiperalgesia. En un sistema biológico, la intensidad de la respuesta es mayor en un estado anormal para la intensidad del estímulo subumbral (alodinia) y supraumbral (hiperalgesia).
El 6d muestra una respuesta con respecto a dos ciclos de secuencias de calentamiento con la secuencia de 60 → 90 → 60 → 90 ° C. Aquí puede ver que la respuesta para el segundo ciclo de calentamiento aumenta y el umbral se reduce.
El comportamiento del receptor artificial muestra claramente alodinia por debajo del umbral de intensidad e hiperalgesia por encima del umbral de intensidad (70 ° C). De esto se deduce que al reducir el umbral y aumentar la intensidad de la respuesta, el nociceptor activa y mejora las reacciones de defensa, como la retirada o la evitación de estímulos dolorosos agudos.
Demostración del principio de funcionamiento del equivalente electrónico del cuerpecito de Pacini.
Para un conocimiento más detallado de los matices del estudio, le recomiendo que consulte el informe de los científicos y materiales adicionales .
Epílogo
El cerebro humano es uno de los sistemas biológicos más complejos. Pero no se puede negar el hecho de que la piel humana no es menos compleja, especialmente dada la considerable lista de funciones que realiza.
No es difícil recrear algunas de las funciones de la piel en un equivalente artificial, pero con respecto a los receptores que recopilan información sobre el medio ambiente, no funcionará por así decirlo.
Sin embargo, los científicos aún han logrado algunos resultados en la creación de receptores artificiales que capturan la presión, la temperatura y el dolor.
Según los autores de este trabajo, su dispositivo es capaz de distinguir entre un toque ligero y, por ejemplo, un pinchazo de aguja. A primera vista, son cosas muy comunes, pero anteriormente tal precisión no estaba presente en los receptores electrónicos.
En el futuro, los científicos, naturalmente, tienen la intención de continuar su trabajo para expandir el rango de estímulos externos percibidos, lo que hará que su dispositivo sea aún más preciso. Estos desarrollos definitivamente encontrarán su aplicación no solo en prótesis, sino incluso en robótica.
Gracias por su atención, ¡tengan curiosidad y tengan un gran fin de semana, chicos! :)
Un poco de publicidad
Gracias por estar con nosotros. ¿Te gustan nuestros artículos? ¿Quieres ver contenido más interesante? Apóyanos haciendo un pedido o recomendando a amigos, VPS en la nube para desarrolladores desde $ 4.99 , un análogo único de los servidores de nivel de entrada que hemos inventado para usted: Toda la verdad sobre VPS (KVM) E5-2697 v3 (6 núcleos) 10GB DDR4 480GB SSD 1Gbps desde $ 19 o cómo dividir el servidor correctamente? (opciones disponibles con RAID1 y RAID10, hasta 24 núcleos y hasta 40GB DDR4).
¿Dell R730xd es 2 veces más barato en el centro de datos Equinix Tier IV en Ámsterdam? ¡Solo tenemos 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV desde $ 199 en los Países Bajos!Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - ¡Desde $ 99! Lea sobre Cómo construir la infraestructura de bldg. clase con el uso de servidores Dell R730xd E5-2650 v4 a un costo de 9000 euros por un centavo?