Nosotros, un pequeño equipo de desarrollo de uno de los departamentos de YaKurier, realmente queríamos contribuir al espacio de rápido desarrollo de las tecnologías no tripuladas. Compró un Prius para experimentar, un poco de periferia, concibió su propio truco con el foco de un sistema inteligente, imitando la atención del conductor. Empezamos. ¿Y qué pasa con el propio sistema de visión por ordenador inteligente y, junto con él, el sistema "subinteligente" que asegura la detección de la novedad, es decir, esta misma atención?
TensorFlow o algo similar, ¿listo? Varios experimentos dejan en claro que para casos dinámicos multifactoriales con reordenamientos de matrices de entrada, muchas subtareas, incertidumbre obvia de muchas clases de datos reconocidos, la inevitable escalabilidad del sistema durante el desarrollo, con el deseo de agregar las convoluciones y capas de su propio autor, la opción está "lista para usar", por extraño que parezca, requiere sudor, sangre, presupuestos y frustración por los errores en los primeros pasos, que lo estropean todo, y que ya no se pueden arreglar (salvo con molestas muletas). Y como somos un equipo bastante ingenuo, decidimos jugar a nuestra manera. Existe la opinión de que el punto no está en TensorFlow, sino en la tecnología que implementa, y podremos simplificar algo, mejorar algo, pero cambiar algo por completo.
Hablemos primero de los enfoques de clasificación y reconocimiento de patrones, estamos seguros de que lo sabes todo sobre ellos, pero adónde puedes ir sin delineador de ojos. Nos ceñiremos a visualizaciones y abstracciones más humanas en lugar de hablar en un lenguaje matemático estricto y tomaremos un caso abstracto de reconocimiento de pepinos y tomates convencionales.
Clasificación y reconocimiento de patrones
- , , : ( ) ( ). «», , // , , , , , , x_1 x_2.
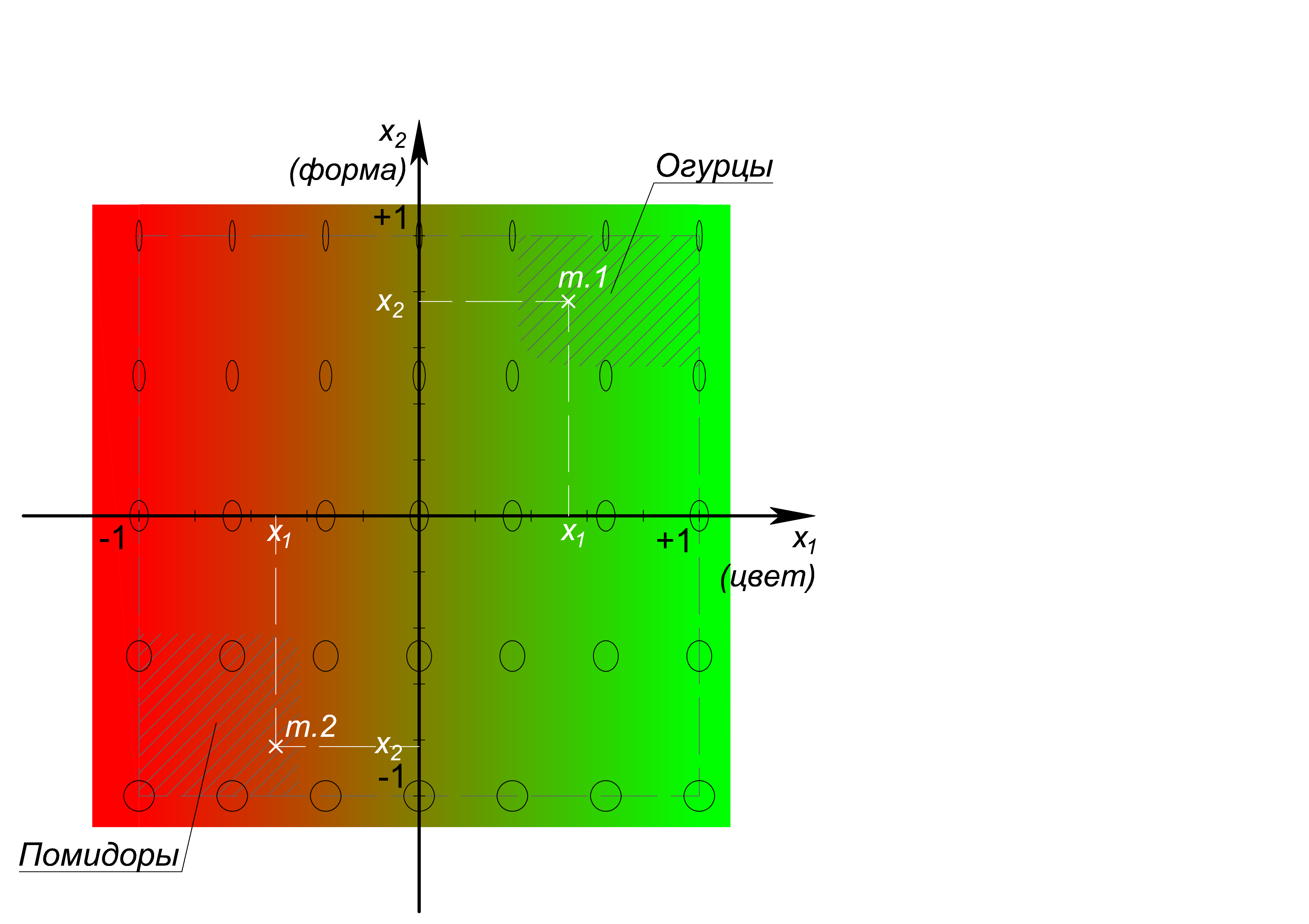
, , x_1: (-1), (+1); x_2: (-1), () 1/5 (+1). – , – , . , , , , , 1 {(x_1=0,53@x_2=0,77)} – , 2 {(x_1=-0,51@x_2=-0,82)} – .
, , – – 2 . , , , -, , -, , , , , , , 900 (3030 px) , 900- . , , , (, ).
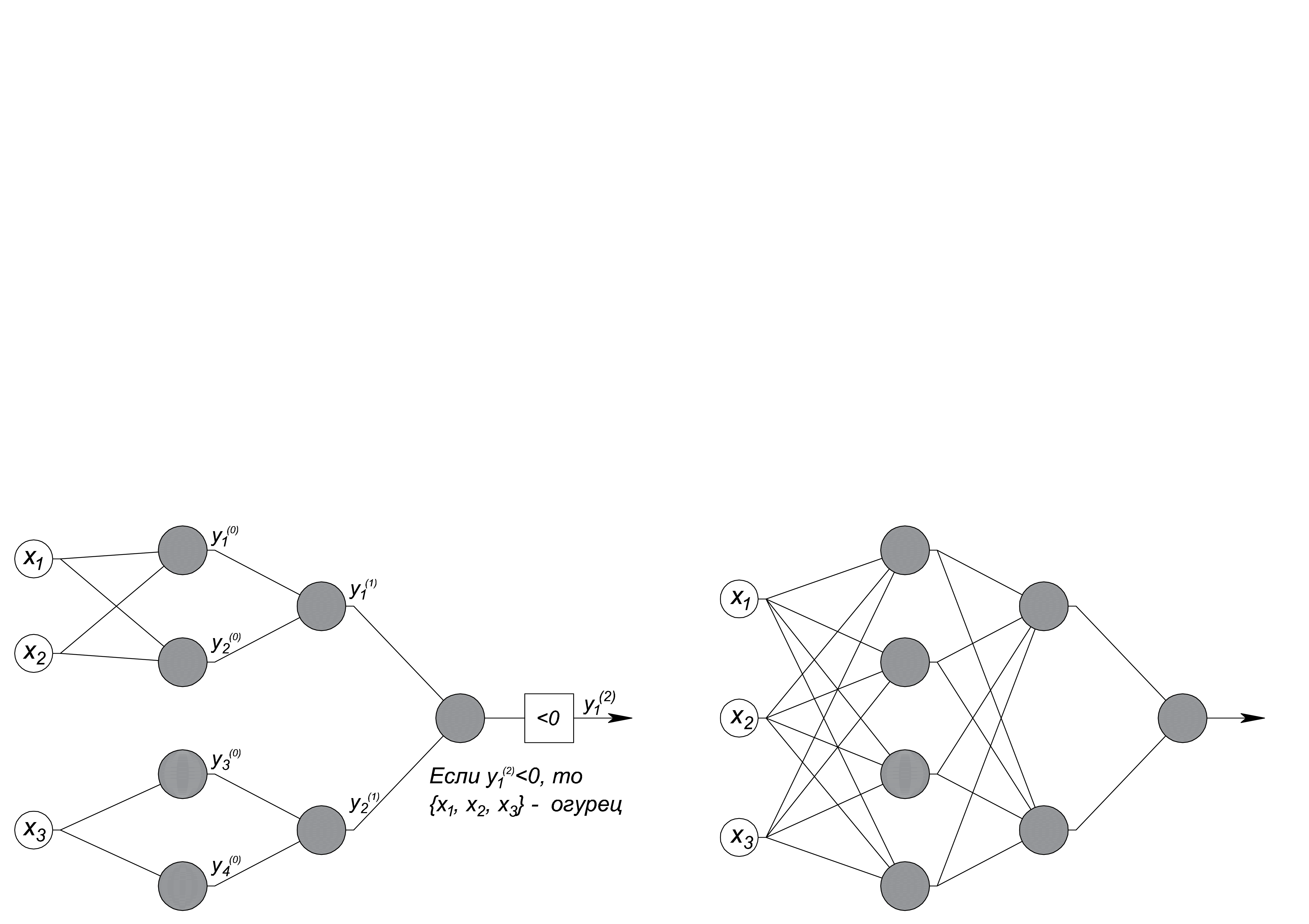
? , . , , , - ? , , . , . , , : , , , , , :
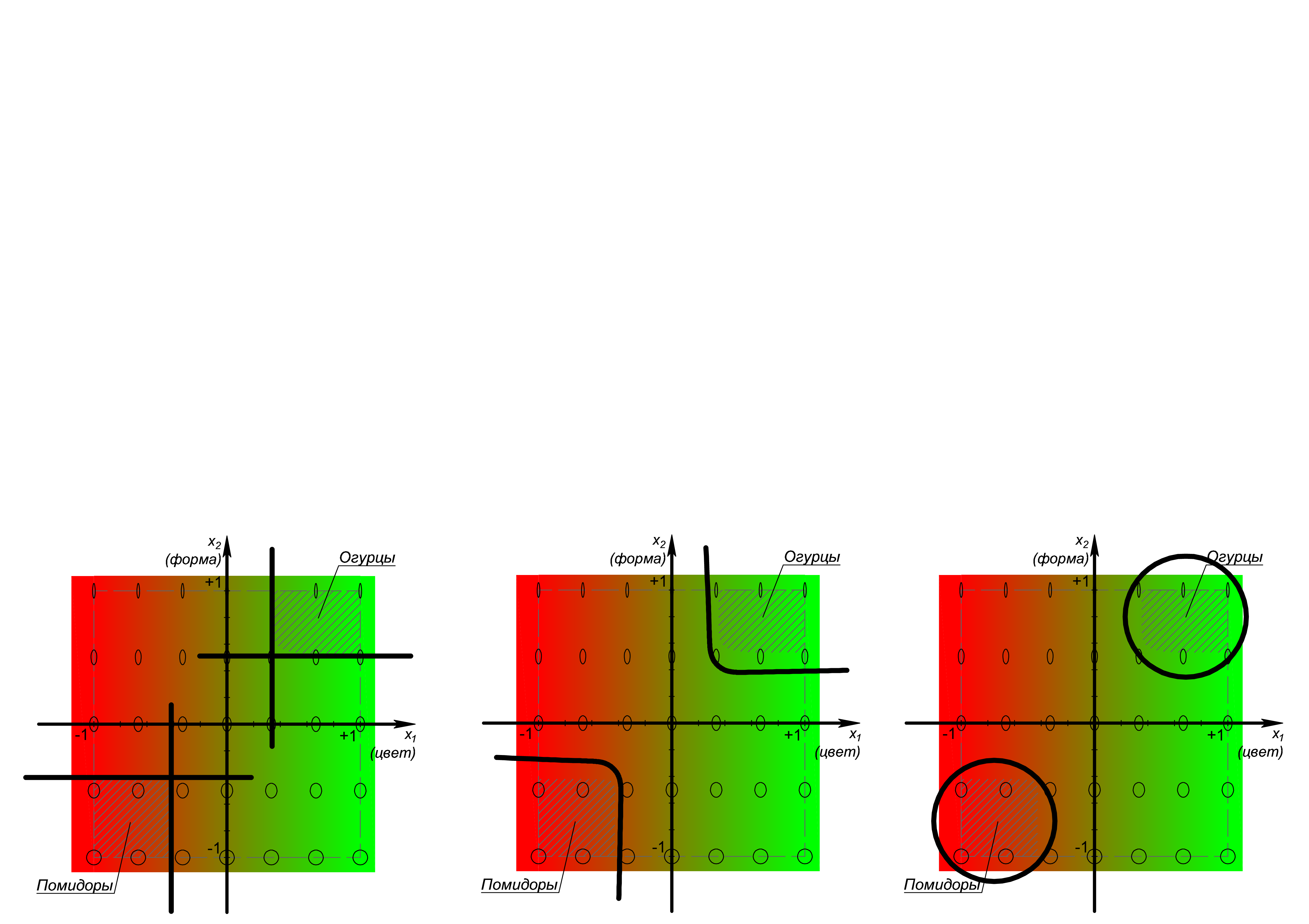
, 4- , .. N- .
II-
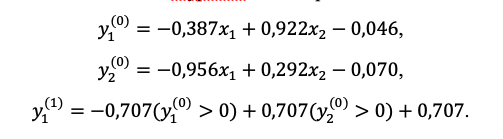
, , . , , , . :
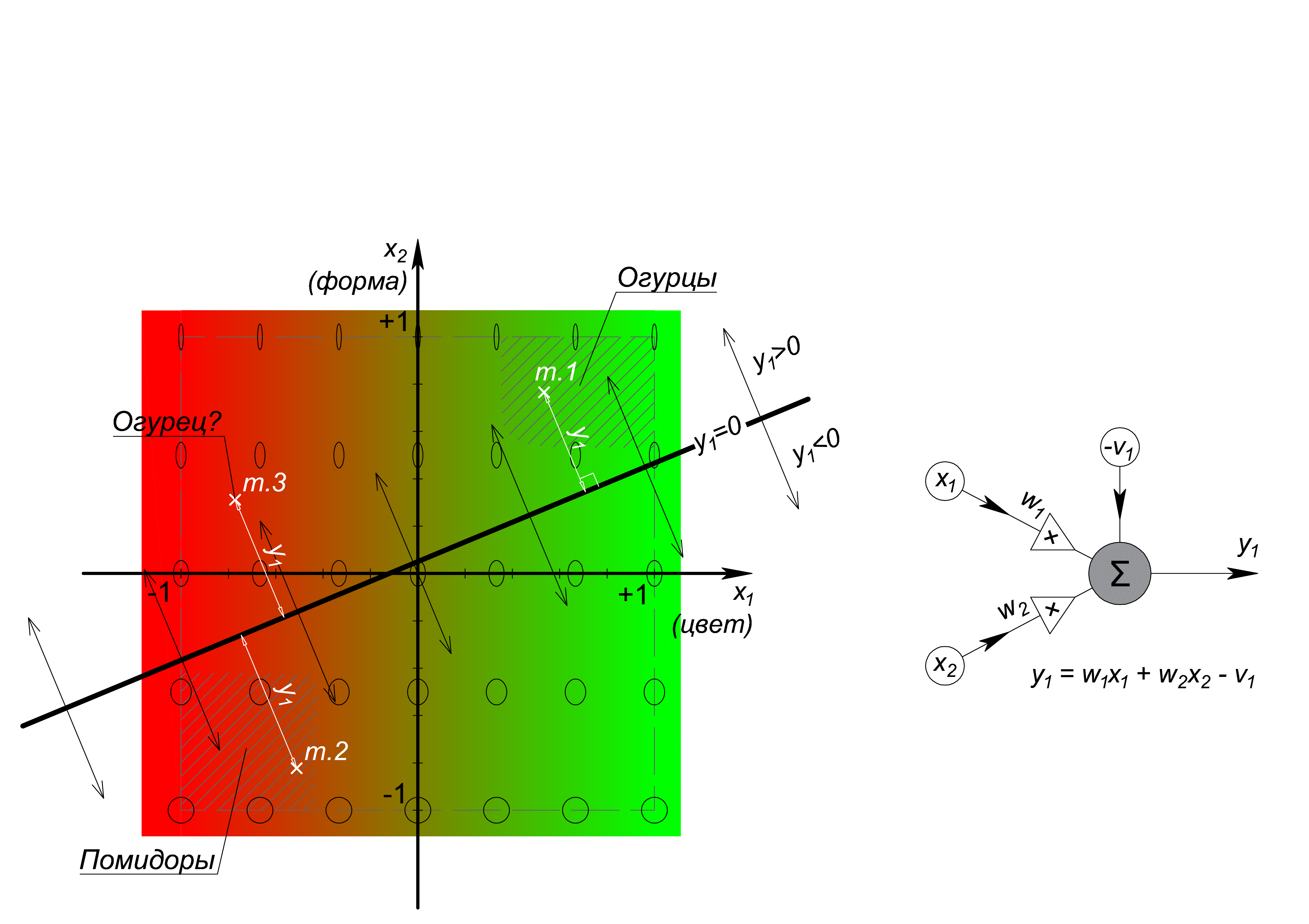
: Ax+By+C=0, A, B C w_1, w_2 -v_1, {x;y} {x_1;x_2 }. , N- – N-1. 0, () , , – « », – « », () – . «», «» «- » , - , (. ). . , , . .
0, «» « », «», «» « » « » 1- .
w (k)/j, , N- – . , , , . , 0 1 .
– , ( , – ):
– , , ( ), Ax2+By2+Cxy+Dx+Ey+F=0, . - , , ( , ). , / , , . .
, - . – , , , – , – . : S-, A-, R- . , , MNIST, : , , :
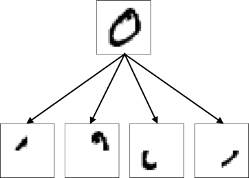
/ …
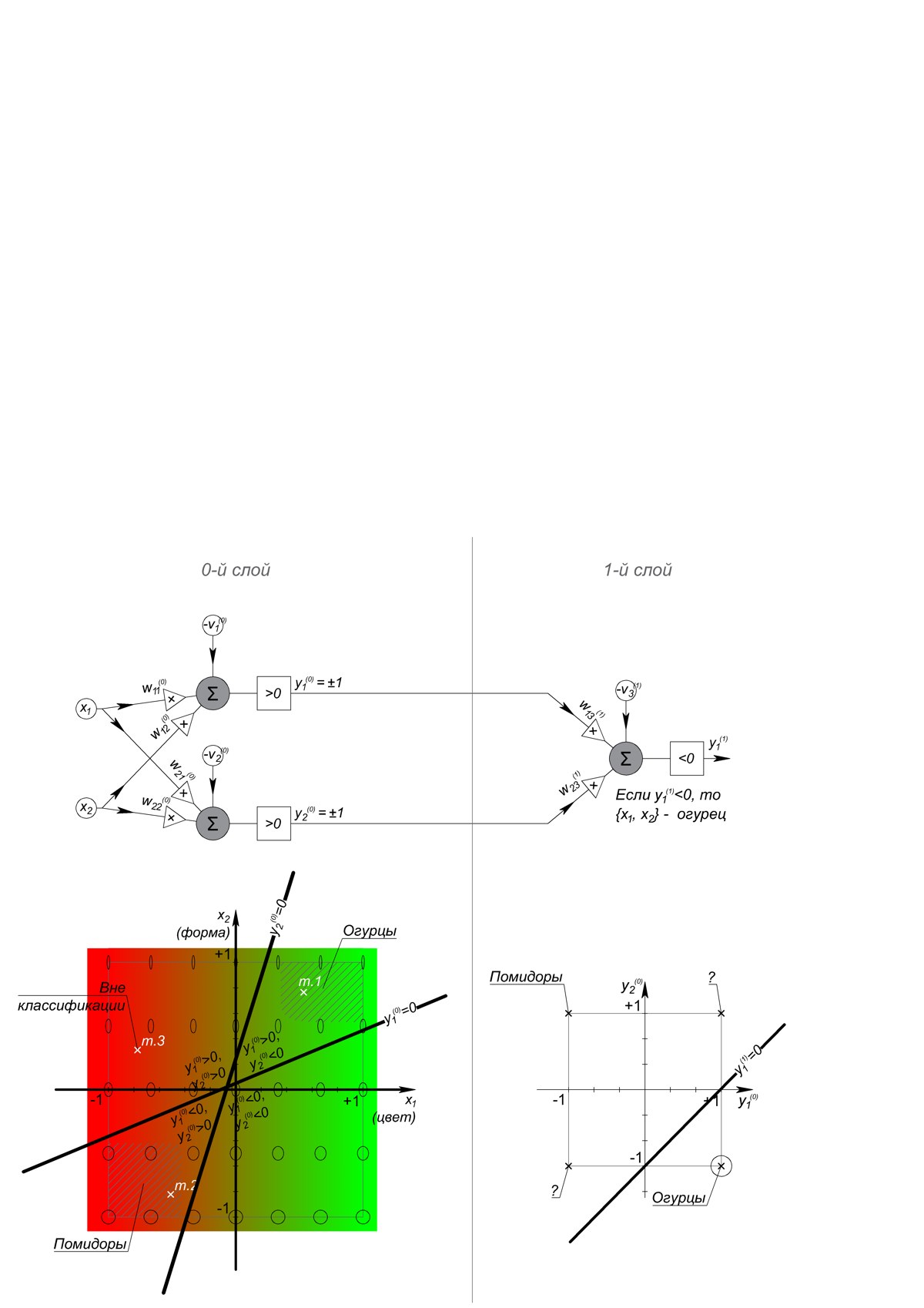
! , 1- :

. . -, , , , , (cost function) , , , . , - , «» , , , , , , , , , , , , – ( – , – ):
-, , , , , - , . , , , , , . . . 2-- - :
? , x_1: – (-1), – (+1); x_2: – (-1), 1/5 – (+1). , 2- - , , 900- ? , 1- , – . , . , II- – , , .
. , , , , . . , , .
, , , , .
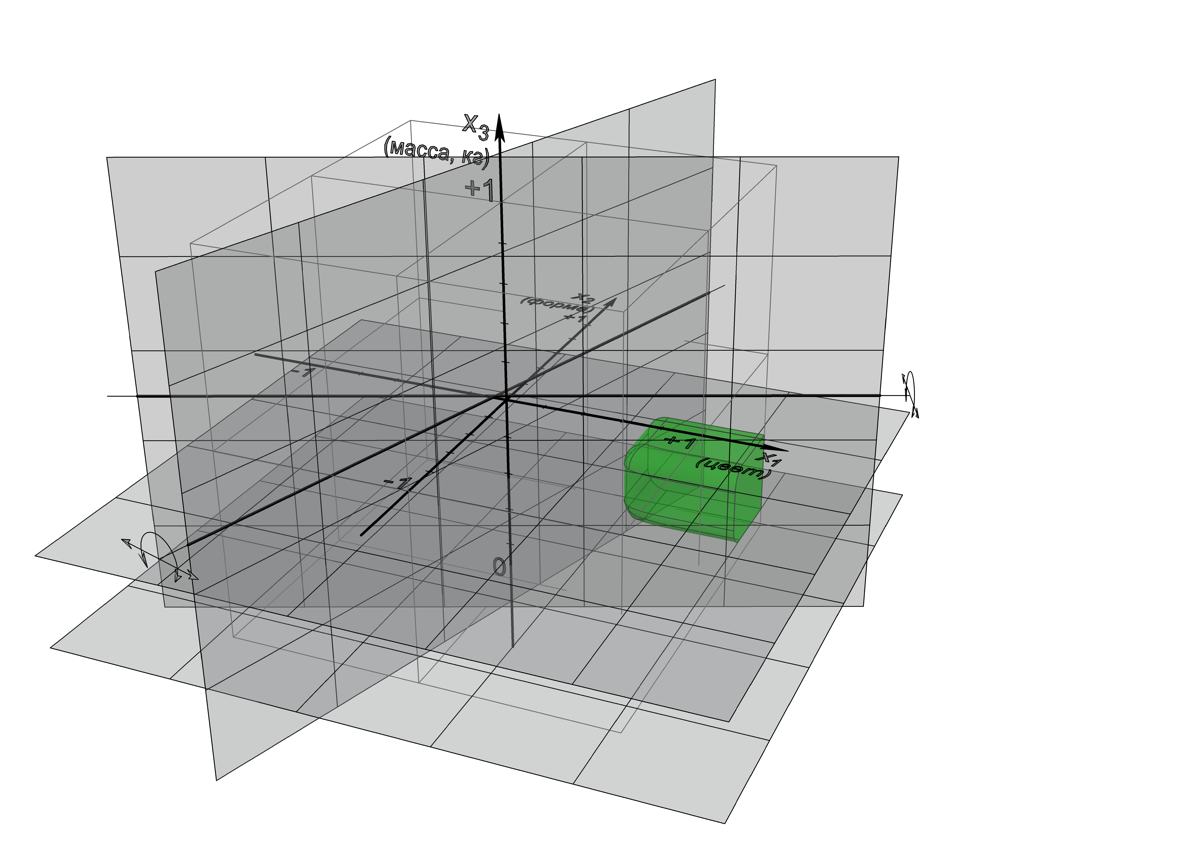
, , , , : , , , / , , . , , , , , , , , , , - .
. ? -, , , -, , , , . , , . , , , – .
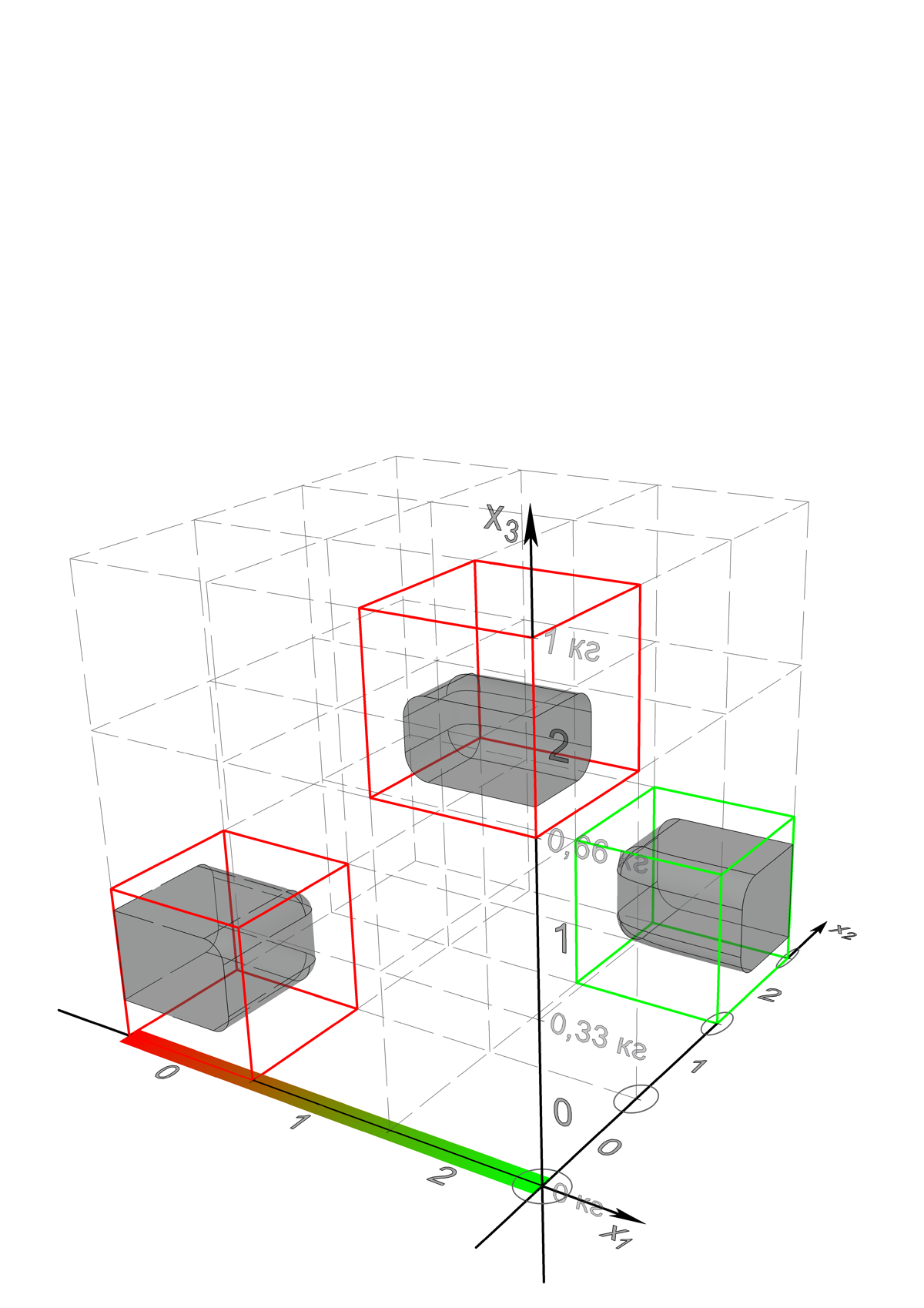
? {0;0;0} {2;0;2} , {2;2;0} – . , , . , , , , , , , .. , . , , , , , , , , .
. , , , , , , , , .
:
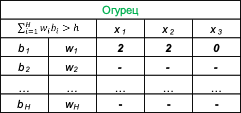
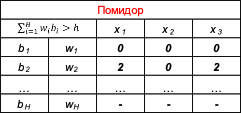
w_i – , b_i – , . h. , /, , – .
? , , , , , – . . , , , , , GPU CUDA.
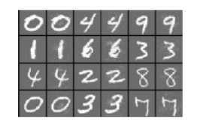
MNIST, 28x28 px. 10 10 , , – . , , .
, , , , , 30÷60 .
, , , . – MNIST, – , – .
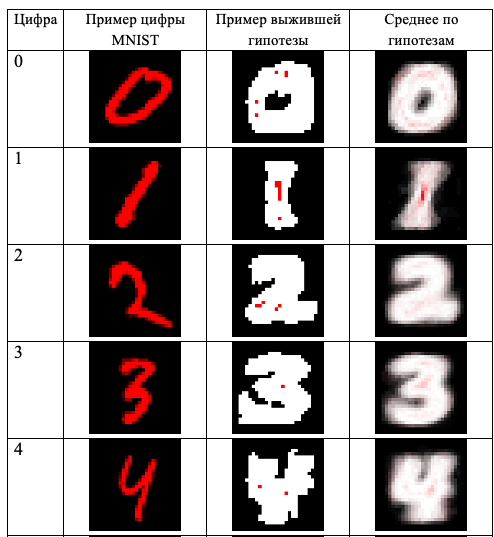
, , . , , .
« » .
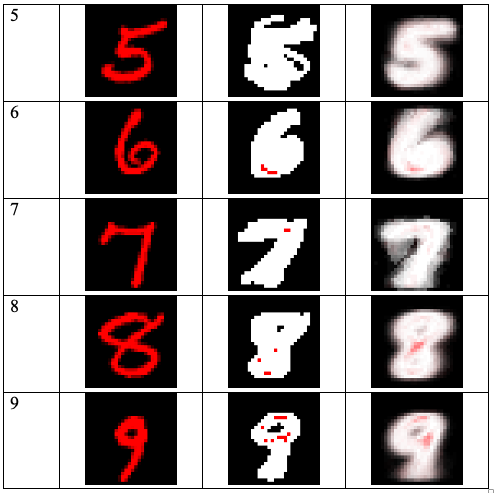
( « »), , « » « ». , , , , «».
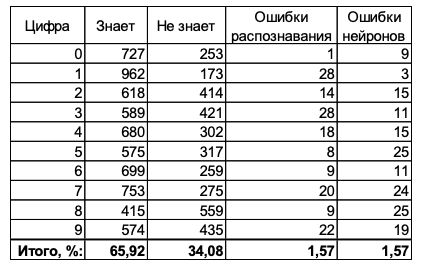
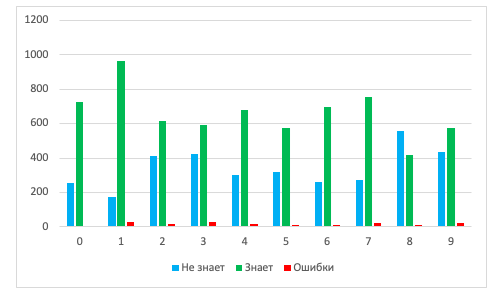
, , , (), , , ( , ). , TensorFlow 2- , , MNIST 2,6%, . , .
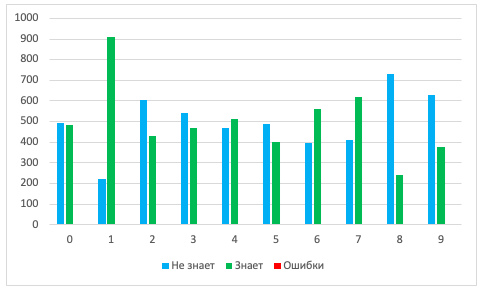
MNIST (10 000 ) « ».
, + 25%:

:
:
- ;
- , , , .
:
- , , , , ;
- ;
- , , ;
- .
, , , , , .
Hmm, ¿qué tiene que ver la tecnología no tripulada mencionada al principio con esto? Confiamos que es en este ámbito donde nuestra red inteligente encontrará sus principales aplicaciones, permitiéndonos superar las barreras existentes asociadas a la multiplicidad, variabilidad y heterogeneidad en la percepción y reconocimiento del entorno.