Como suele suceder conmigo, cuando surge una idea, se reflexiona sobre ella y luego (Ostapa comienza a soportar) se llena de funciones adicionales en las que inicialmente no pensé. Estos pensamientos encienden la pasión de la creatividad y comienza el proceso.

Entonces, todo comenzó con el hecho de que durante una caminata era necesario ver la hora actual para saber la hora de la caminata ...
No es conveniente mirar la hora en el teléfono todo el tiempo y no uso reloj durante mucho tiempo. Esto significa que necesita un indicador en un lugar conveniente que muestre la hora actual, así como el tiempo de caminata, para no contar todo el tiempo. Al caminar en la oscuridad, el niño no es visible en el cochecito, lo que significa que debe equipar la cuna con iluminación. Además, al conducir en lugares sin iluminación artificial, sería bueno tener un faro delante para iluminar el camino. En la estación fría, me gustaría saber la temperatura del aire en la cuna, así como la temperatura del aire en el exterior.
Para garantizar la visibilidad de la carriola por la noche, al moverse por las calles, se planteó la idea de equipar el marco de la carriola con iluminación LED. Y para que la retroiluminación no fuera aburrida, utilicé LED "inteligentes" para el marco y las ruedas.
El indicador y los botones de control deben estar en un lugar accesible, y en mi caso este es el marco de la carriola.
La fuente de alimentación del dispositivo debe garantizar que el sistema esté operativo, teniendo en cuenta la iluminación decorativa y los faros incluidos. También debe cargarse desde USB.
Estas eran las principales funciones que quería dar vida. Pero el pensamiento fue más allá. Quería saber la distancia que recorrió la silla de ruedas durante la caminata actual, durante el día, durante todo el tiempo. También la velocidad de conducción actual.
Una vez no noté un pinchazo y conduje a casa durante 4 km con un pinchazo. Pensé en controlar la presión de los neumáticos.
Bueno, al final, es hora de pensar en la seguridad del cochecito en sí. Para esto planeé usar un receptor GPS / GLONASS y un módem GSM.
Funcionalidad completa implementada del cochecito de bebé inteligente:
- ;
- GPS/;
- ;
- ;
- ;
- , ;
- ;
- ;
- ;
- ;
- (TPMS);
- ;
- ;
- GPS/ ;
- GSM- .

Dado que el circuito contiene muchos elementos y una batería de gran capacidad, se decidió implementar el dispositivo en dos bloques: la unidad principal y la pantalla. La unidad principal se muestra en la Fig.1, la unidad de visualización en la Fig.2.

Figura 1. Diagrama esquemático de la unidad principal del dispositivo
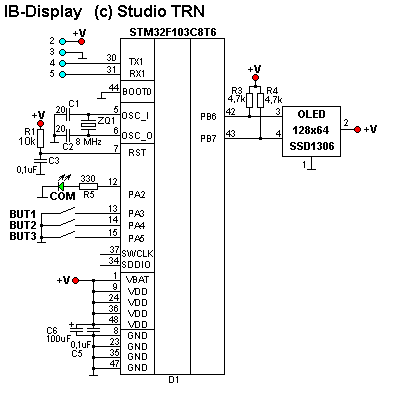
Fig.2. Diagrama esquemático de la unidad de visualización
Se eligió ARM como controlador del dispositivo D1. La unidad de carga de la batería se implementa en los microcircuitos D3, D4 de acuerdo con el esquema de conmutación estándar. La carga proviene de un cargador de teléfono a través de un conector USB. Además, opcionalmente, la batería se carga desde la red de a bordo con un voltaje de 6-20 voltios. Las temperaturas dentro de la base, el exterior y la batería se implementan en el DS18B20. Porque la base se puede quitar del marco con el propósito de transportarla o reemplazarla con una versión de verano, luego se conecta un conector a la base, que desconecta la unidad del termómetro y la luz de fondo dentro de la base del dispositivo.
Se utilizó un receptor GPS / GLONASS para determinar las coordenadas locales y la hora exacta actual. Cuando hay una señal de GPS disponible, la hora del sistema se registra en D2. En caso de mala recepción de señales GPS / GLONASS, la hora actual no se corrige, pero el reloj D2 mantiene el ritmo.
D14 (EEPROM 24CL16) se utiliza para almacenar datos de varias estadísticas.
La iluminación decorativa se realiza sobre LED WS2812b "inteligentes". Todos los elementos de iluminación, incluidos el faro y las ruedas, están alineados en una cadena de información.
El bloque informante se ensambla sobre los elementos D6, D7, D8. El circuito se copia de un módulo MP3 chino basado en el JQ6500. Los fragmentos de música MP3 se cosen en Flash D7 a través de USB.
ADXL345 se utiliza como acelerómetro D9. Los datos del acelerómetro se utilizan para monitorear irregularidades en la carretera, así como por motivos de seguridad.
El subsistema de control de la presión de los neumáticos me ha fascinado durante mucho tiempo y, por lo tanto, se le otorgó un artículo aparte [1]... El hecho es que el TPMS chino que utilizo en mi dispositivo tiene una unidad receptora, que está diseñada para controlar la presión en el rango de 1.1 atm - 3.2 atm. El sistema estándar notifica la presión fuera de este rango con un chirrido cada vez que se sondean los sensores. Los sensores se sondean periódicamente después de aproximadamente 30-60 segundos en funcionamiento normal. Por lo tanto, no es posible colocar simplemente la unidad estándar en el cochecito. Y no es interesante. Es mucho más interesante estudiar el protocolo e implementarlo en su sistema, lo cual se hizo. El sistema consta de cuatro sensores externos que se atornillan al racor de la rueda.

Los sensores son inalámbricos; transmiten periódicamente información sobre la presión de la rueda y la temperatura del aire en la rueda. Frecuencia de emisión del transmisor 433,92 MHz con modulación FSK. Para capturar señales de los sensores, se utilizó un módulo transceptor en un microcircuito SI4432.
Para transferir datos al sitio de rastreo GPS, se utiliza un módem GSM SIM800C. El seguimiento se utiliza para el sistema de seguridad antirrobo de la silla de ruedas, así como para almacenar pistas para caminar para la historia.
La unidad principal y la unidad de visualización están hechas en placas de circuito impreso y se muestran en la Fig.3. y fig.4.

Fig. 3. Aspecto del tablero de la unidad principal de un cochecito de bebé "inteligente"

Fig.4. Apariencia del tablero de visualización
El dispositivo utiliza una pantalla OLED en el controlador SSD1306. La pantalla es pequeña y cabe en el asa del cochecito. Pero esto también es un gran inconveniente, porque cuando el cochecito vibra durante el movimiento, la letra pequeña no es visible. Por lo tanto, las pantallas de información principales se muestran en letras grandes.


La unidad principal y la unidad de visualización están conectadas mediante un puerto serie, lo que reduce la cantidad de cables.
Los sensores Hall se utilizan como sensor de velocidad y como sensor para activar el sistema de frenos. Los sensores están montados en una placa separada en la rueda, barnizados contra la humedad y sellados.


Los LED de iluminación decorativa están montados sobre un marco en perfiles de aluminio con filtros de luz y también están sellados desde el exterior. Los anillos LED tienen clasificación IP30, por lo que debían sellarse contra la humedad.



Todos los cables se colocan dentro del perfil del marco de la carriola, hay transiciones en los puntos de flexión cuando la carriola está plegada.




El sistema está constantemente en modo de espera. Todos los dispositivos menores se desactivan con la tecla VT3. Los controladores de ambos bloques operan a una frecuencia reducida y los periféricos ARM innecesarios también se desactivan. Tan pronto como se presiona una determinada secuencia de botones (protección para que un extraño lo encienda), el sistema se despierta, la tecla VT3 se enciende y los módulos se inicializan.
Todos los eventos de emergencia van acompañados de mensajes emergentes en la pantalla y la correspondiente melodía del informante.
Descripción de la parte de software del dispositivo
El sistema se enciende inicialmente mediante un interruptor de palanca oculto y se pone en modo de espera. El encendido y apagado adicional del sistema se realiza presionando una cierta combinación de botones de la unidad de visualización.
Cuando el sistema se enciende en el modo de funcionamiento, los controladores cambian a una frecuencia más alta, se inicializan varios subsistemas y se reproduce una melodía de inicio.
Además, cada bloque comienza su trabajo, se procesan los datos y se generan eventos para informar sobre alarmas o cuando los valores superan los límites especificados.
Los puntos de ajuste para la presión de los neumáticos, la aceleración del eje, el exceso de velocidad y otros se establecen una vez en el programa. No tiene sentido cambiar dinámicamente estos valores desde el menú.
Todos los datos recopilados por el sistema se transmiten a la unidad de visualización, que forma imágenes de pantallas de información. Además, los comandos de la unidad principal para controlar los periféricos provienen de la unidad de visualización.
Cuando se suministra energía al módulo GPS / GLONASS, comienza a recopilar información de los satélites y, una vez recopilados los datos necesarios, comienza el análisis. Cuando el receptor emite una bandera de validez de datos, la hora, fecha y coordenadas actuales se toman del paquete GPRMC / GNRMC. El tiempo se registra en el RTC DS3231. A cielo abierto, cuando se enciende por primera vez, la búsqueda de satélites tarda unos dos minutos. El receptor GPS / GLONASS utilizado tiene un "procedimiento de predicción" durante dos semanas. Cada vez que se enciende, no necesita recopilar una gran cantidad de datos, por lo que se emiten las coordenadas adecuadas en unos pocos segundos. Esto siempre que durante el tiempo transcurrido desde el último encendido el receptor no se haya movido una gran distancia del punto anterior, y también si hay una batería de respaldo.
El sistema de carga de la batería está basado en hardware y no depende del estado del sistema. Pero las señales sobre el proceso de carga van al controlador para su análisis. Cuando el cargador está conectado, el controlador ve que la carga ha comenzado. Para calcular la duración de la carga, así como el tiempo de la última carga, con el fin de mantener las estadísticas de la batería, el controlador enciende brevemente la llave de habilitación de periféricos, lee la hora, accede a la EEPROM y apaga la llave. Una vez completada la carga, se realizan acciones similares, pero la hora de finalización de la carga ya está registrada y se considera la duración de la carga.

La temperatura de la fuente de alimentación, dentro y fuera de la base, es monitoreada por un sensor DS18B20. El procedimiento de sondeo utiliza el modo semidúplex del puerto UART y un controlador DMA.
Se utiliza un módem para transferir datos a Internet. Para ahorrar energía, el módem se enciende solo cuando se necesita transmisión de datos. Esto sucede en el modo "antirrobo" o cuando se activa manualmente.
Inicialmente, el módem no estaba planeado, pero como el esquema ya contenía todo lo necesario para el rastreo, el módem simplemente suplicó por su uso. Pero lo más interesante de todo es el sistema "antirrobo". Lo fundamental es informar discretamente que se está produciendo un "secuestro" y transmitir las coordenadas de la silla de ruedas en tiempo real. Si el cochecito está en casa, entonces no hay necesidad de "antirrobo", pero si está en el sitio fuera de la puerta y los extraños pueden tener acceso, entonces este modo es relevante.
Entonces, el cochecito está parado afuera de la puerta en modo de espera. Solo aquellos usuarios que conocen la secuencia de presionar los botones pueden encender la carriola desde el panel. El atacante desconoce la presencia de algún sistema en la silla de ruedas. Simplemente toma el cochecito y lo aparta. El controlador ve la presencia de vibración del acelerómetro, también ve la rotación no autorizada de la rueda y activa un modo de alarma silenciosa. Suministra energía a todos los módulos, inicializa el módem y envía un SMS de alarma al teléfono del propietario. Está registrado en la celda # 1 de la tarjeta SIM. Luego comienza a enviar información sobre el LAC y CID de las estaciones base del operador celular al sitio de seguimiento. Tras la llegada de datos adecuados sobre coordenadas del receptor GPS / GLONASS, se incluyen en el paquete de transmisión.
La pantalla está apagada en este momento y no se escuchan señales de sonido.
Si un usuario autorizado olvidó accidentalmente encender el sistema antes de caminar, puede apagar el sistema encendiéndolo correctamente desde el panel de visualización y detener manualmente el seguimiento.
Se pensó en hacer señales breves durante la vibración en el modo de espera o decir alguna frase, pero entonces el atacante sabrá que el cochecito no es fácil y el apetito aumentará, pero ya estará preparado. Por lo tanto, me detuve en modo silencioso.
No había ningún deseo de crear mi propio sitio de seguimiento. No hay tiempo suficiente para nada. Por eso, decidí ver qué está listo en este momento. Me sorprendió mucho encontrar muchos sitios de rastreo que le permiten conectar una gran cantidad de protocolos de rastreadores GPS listos para usar, y también pueden vincular su protocolo de rastreo único a su sistema, los administradores lo ayudarán con esto. No quería presionar a los administradores para que se adaptaran a mi protocolo y, por lo tanto, se decidió hacer un protocolo de intercambio que los sitios ya soporten. De todos modos, todo está escrito desde cero. Aunque en el sitio que elegí, los administradores enviaron su formato de paquete casero que su sitio acepta, pero decidí seguir con uno de los estándar. Me gustó el formato del rastreador GPS MegaStek.
El formato del paquete de transferencia de datos del rastreador al sitio está disponible gratuitamente. Tengo un paquete como este:
$MGV002,351233456789,_TrackerName,R,200220,092552.000,A,3340.2243,N,02532.3216,E,00,04,00,1.20,02.5,15.9,280.06,02.312,250,02,0000,0000,25,1111,0105,1201 1201, 302 302,0401,23.4,07.2,,10,81.4,Timer;!Transmite un ID de dispositivo único, nombre de dispositivo, coordenadas, hora, dirección de movimiento, LAC, CID y más.
Para ver la posición de su rastreador, debe registrarse en el sitio. Puede verlo a través del sitio web o mediante la aplicación en el teléfono. Me gustó mucho la aplicación, no es grande, fácil de navegar, hay una variedad de mapas. Pero lo principal es que puede registrar varios rastreadores de forma gratuita, y si paga por una cuenta, obtiene acceso a funciones avanzadas. En general, los servicios de rastreo, hoy, me hicieron muy feliz, en comparación con el período anterior.

El trabajo con el informador MP3 se produce a través de la UART mediante comandos. Los archivos MP3 se escriben en el informante de Flash a través del software de un desarrollador chino mediante una conexión USB. Seleccione archivos y envíelos. Mas que suficiente. Inicializo el JQ6500, configuro el nivel de volumen y luego, al llegar los eventos, se envía un comando para reproducir el archivo con el número deseado. Antes de reproducir el archivo, la señal de silencio se elimina del amplificador de potencia digital D8.
Los comandos se describen completamente en la descripción del microcircuito, así como en bibliotecas de terceros, por lo que no me detendré en ellos.
El sistema de control de la presión de los neumáticos, como se describe anteriormente, se basa en sensores inalámbricos estándar, cuya señal se recibe en el sistema a través del transceptor SI4432. El transceptor está sintonizado en frecuencia, modulación, desviación del sensor. Luego, se planeó analizar la señal de manera programática, tomando el paquete sin procesar del aire. Pero la presencia de procesamiento de paquetes en este transceptor facilitó enormemente la vida del controlador principal. Pude sintonizar el transceptor para recibir ráfagas. El propio transceptor hizo todas las operaciones necesarias para recibir el preámbulo, la palabra de sincronización, los datos en sí, y al recibir el paquete completo, generó una interrupción. En caso de interrupción, el controlador principal simplemente leyó el paquete recibido, analizó la suma de comprobación y decodificó los datos recibidos.
Cuando la batería está baja, la iluminación decorativa y los faros delanteros se apagan para ahorrar energía.
Si, en el modo de espera, una señal sobre el movimiento de la silla de ruedas proviene del acelerómetro y si se detecta la rotación de las ruedas, pero el dispositivo no está incluido en el modo de funcionamiento normal, entonces se activa el modo de alarma. Todos los módulos están activados, la pantalla permanece apagada. Aquellos. desde fuera parece que todo está apagado. Tan pronto como aparece una señal del GPS, el módem GSM envía un SMS sobre la alarma al teléfono y comienza a transmitir datos sobre las coordenadas actuales al sitio de seguimiento. También se transmiten los datos de presión de los neumáticos.

La velocidad actual está determinada por un sensor Hall en la rueda. Además, la velocidad se toma del módulo GPS / GLONASS.
Cuando el cochecito está en el freno, la iluminación externa cambia al modo de luz estroboscópica alterna de las luces izquierda y derecha.
El dispositivo informa con un mensaje emergente en la pantalla y una señal sonora sobre superar la velocidad de más de 7 km / h, sobre irregularidades en la carretera, sobre baja presión de aire en las ruedas. Las melodías sonoras marcan cada hora de la caminata y cada nueva hora astronómica.
La iluminación dentro de la cuna de la carriola tiene la capacidad de cambiar el brillo presionando y manteniendo presionado el interruptor de luz, pero para mis necesidades no lo uso.

La unidad de visualización tiene tres botones que responden a pulsaciones cortas y largas. Una pulsación corta del botón de luz ambiental enciende el faro y una pulsación larga controla los diferentes esquemas de color para la iluminación del cuadro y de la rueda.
La pantalla muestra toda la información necesaria sobre el funcionamiento del dispositivo. Debido al pequeño tamaño de la pantalla, la información se muestra en varias pantallas. El cambio de pantalla se realiza mediante un botón en el panel de visualización. Hay dos pantallas principales en las que se muestra la hora actual en letra grande y la pantalla de caminata, que muestra la distancia recorrida durante la caminata, la velocidad actual, el tiempo de caminata y la temperatura dentro de la cuna. Las pantallas restantes muestran información de diagnóstico sobre el funcionamiento de los subsistemas de control de la presión de los neumáticos, el acelerómetro, el módem, la batería y la información resumida. Todas las imágenes se forman en el búfer del controlador, desde donde se transfieren a la pantalla de una vez por medio del controlador DMA.


En la pantalla de control de presión de los neumáticos, al recibir una señal de cualquier sensor, la rueda correspondiente parpadea en la imagen del cochecito. Si la presión está por debajo del punto de ajuste, el valor de temperatura parpadea y el informante emite una señal de advertencia periódica y una ventana emergente en la pantalla.


La pantalla de carga de la batería contiene información sobre el voltaje actual de la batería, el modo de funcionamiento del cargador y la fecha de la última carga. El controlador de la carriola se puede cargar desde cualquier fuente de voltaje de 5V, ya sea un cargador de teléfono inteligente o, como se muestra, desde una luz exterior equipada con una toma USB.

La carriola tiene cunas extraíbles: estándar, en la que solo se acuesta el niño, y una carriola donde también puede sentarse. Ambas cunas están equipadas con iluminación LED del espacio interior y sensores de temperatura exterior e interior. Se proporcionó una conexión desmontable entre la base y la unidad principal, y la elección recayó en un conector USB estándar. Cuando retire o reemplace la base, primero debe desconectar el conector y luego quitar la base del armazón del cochecito. Después de instalar la base, conecte el conector. El controlador sabe qué soporte está actualmente en uso mediante los números de serie únicos de los termómetros.

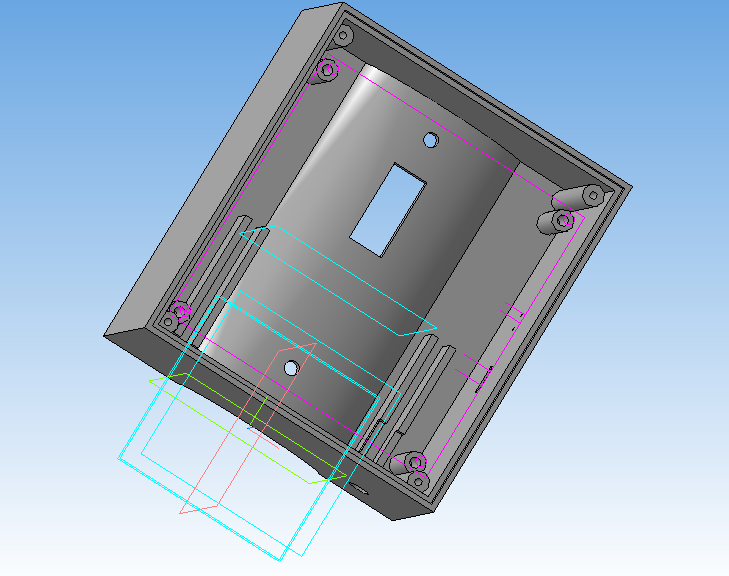
Alojamiento
Los cuerpos se modelan de acuerdo con la curvatura de las superficies del marco del cochecito y se imprimen en 3D.

Desarrollo
Se puede utilizar en bicicletas, coches de juguete para niños con fuente de alimentación a bordo de 6 ... 20 voltios.
Puede usar un tipo diferente de pantalla reemplazando solo la unidad de pantalla.
Conclusión
Debido a una catastrófica falta de tiempo, la implementación de este proyecto tomó alrededor de 8 meses.
Durante el desarrollo del sistema, se investigó y probó mucho en varios módulos y sistemas: el funcionamiento del acelerómetro, el protocolo de intercambio del rastreador GPS, la transmisión de datos a través del módem GPRS, el trabajo con el transceptor, el trabajo con varios periféricos ARM. Me tomó un mes investigar solo el sistema TPMS, pero fue interesante.
Demostración del funcionamiento del sistema
Expresiones de gratitud
Expreso mi profunda gratitud a los amigos y familiares que me ayudaron en la implementación de este proyecto.
Gracias a Eugene, Alexey, Natalia, Olga.
Enlaces
1. Estudio del protocolo del sistema de control de presión de neumáticos de vehículos .