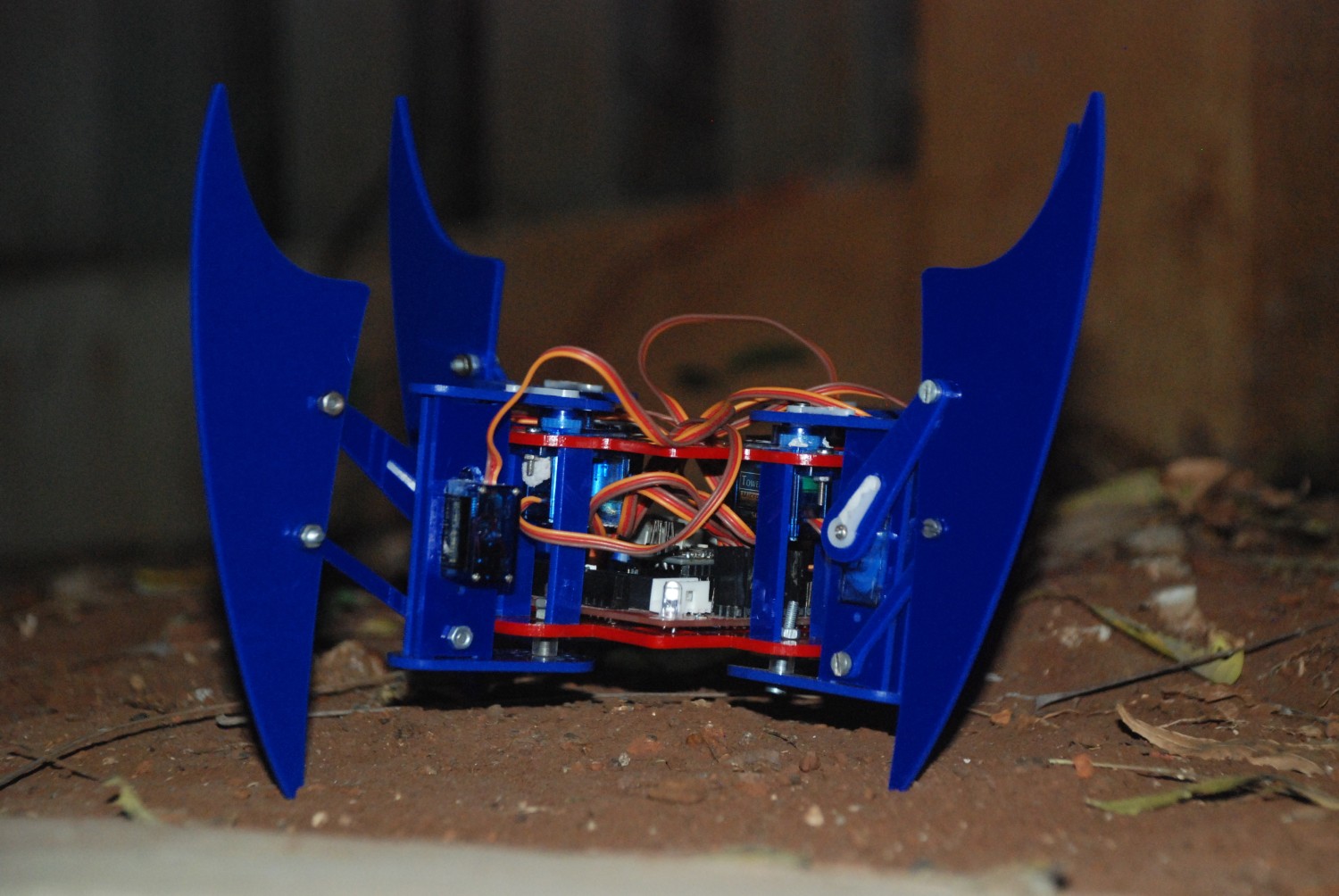
Miles es un robot araña basado en Arduino Nano que usa 4 patas para caminar y maniobrar. 8 servomotores SG90 / MG90 se utilizan como impulsores de patas. Una placa especialmente diseñada le permite controlar y alimentar los motores y el Arduino Nano. La placa tiene ranuras especiales para módulos IMU, Bluetooth y un sensor de infrarrojos, que le da autonomía al robot. El cuerpo se ensambla a partir de plexiglás de 2 mm de espesor cortado en un cortador láser, pero también se puede imprimir en una impresora 3D. Un excelente proyecto para entusiastas del aprendizaje de la cinemática inversa en robótica.
Inspirado en el proyecto mePed (www.meped.io), y utiliza código basado en él.


Materiales
Componentes:
- Cuota (1)
- Componentes Miles para montaje de carrocería.
- Servomotores SG90 / MG90 (12)
- Aduino Nano (1)
- Regulador de voltaje LM7805 (6)
- Interruptor (1)
- Condensador electrolítico 0.33uF (2)
- Condensador electrolítico 0.1uF (1)
- Conector Phoenix de 2 pines y 3,08 mm (1)
- Conectores macho para servomotores.
Opcional:
- Conector de 2 pines Relimate (1)
- Conector Relimate de 10 pines (1)
- Conector de 4 pulgadas Relimate (1)
Paso 1:

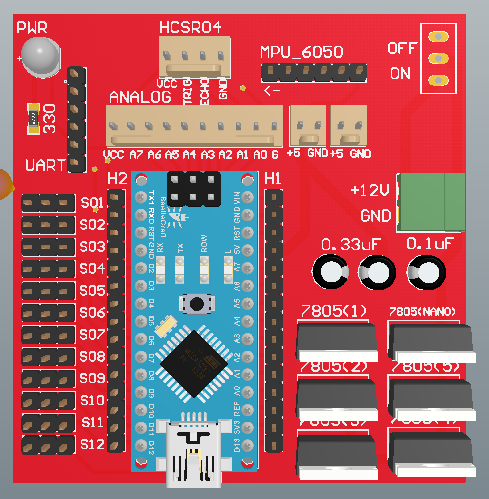

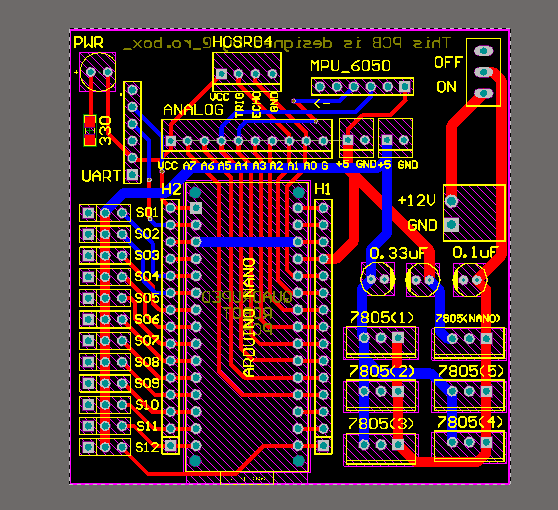
diseño esquemático y de la placa Diseño mis placas en Altium . 12 servomotores SG90 / MG90 pueden consumir hasta 4-5A cuando funcionan simultáneamente, por lo que el circuito debe poder manejar altas corrientes. Usé reguladores de voltaje 7805 para alimentar los motores, sin embargo, cada uno de ellos puede suministrar un máximo de 1 A. Así que conecté 6 LM7805 en paralelo, aumentando la corriente de salida disponible.
Descargue esquemas y archivos Gerber desde el enlace .
Características del esquema:
- Los MPU6050 / 9250 se utilizan para medir ángulos.
- Corriente de salida hasta 6 A.
- Fuente de alimentación aislada para servomotores.
- Salida para sensor ultrasónico HCsr04.
- Hay periféricos para Bluetooth e I2C /
- Relimate tiene todos los contactos analógicos para sensores y actuadores.
- Salidas de 12 servomotores.
- LED indicador.
Características del tablero:
- 77 × 94 mm.
- 2 capas de FR4.
- 1,6 mm.
Paso 2: soldar los componentes y cargar el código

Suelde los componentes a medida que crecen y comience con dispositivos de montaje en superficie.
En mi circuito solo hay una resistencia TMP. Agregue pines hembra al Arduino y LM7805 para que puedan intercambiarse según sea necesario. Suelde las clavijas macho a los conectores del motor.
El circuito usa una fuente de 5V, separada para motores y Arduino. Compruebe si hay cortocircuitos a tierra en todos los rieles de alimentación: salida Arduino de 5 V, salida del motor VCC y entrada Phoenix de 12 V.
Después de verificar la placa, puede programar el Arduino. Publiqué el código de prueba en Github . Llenarlo y montar el robot.
Paso 3: montaje de la carcasa

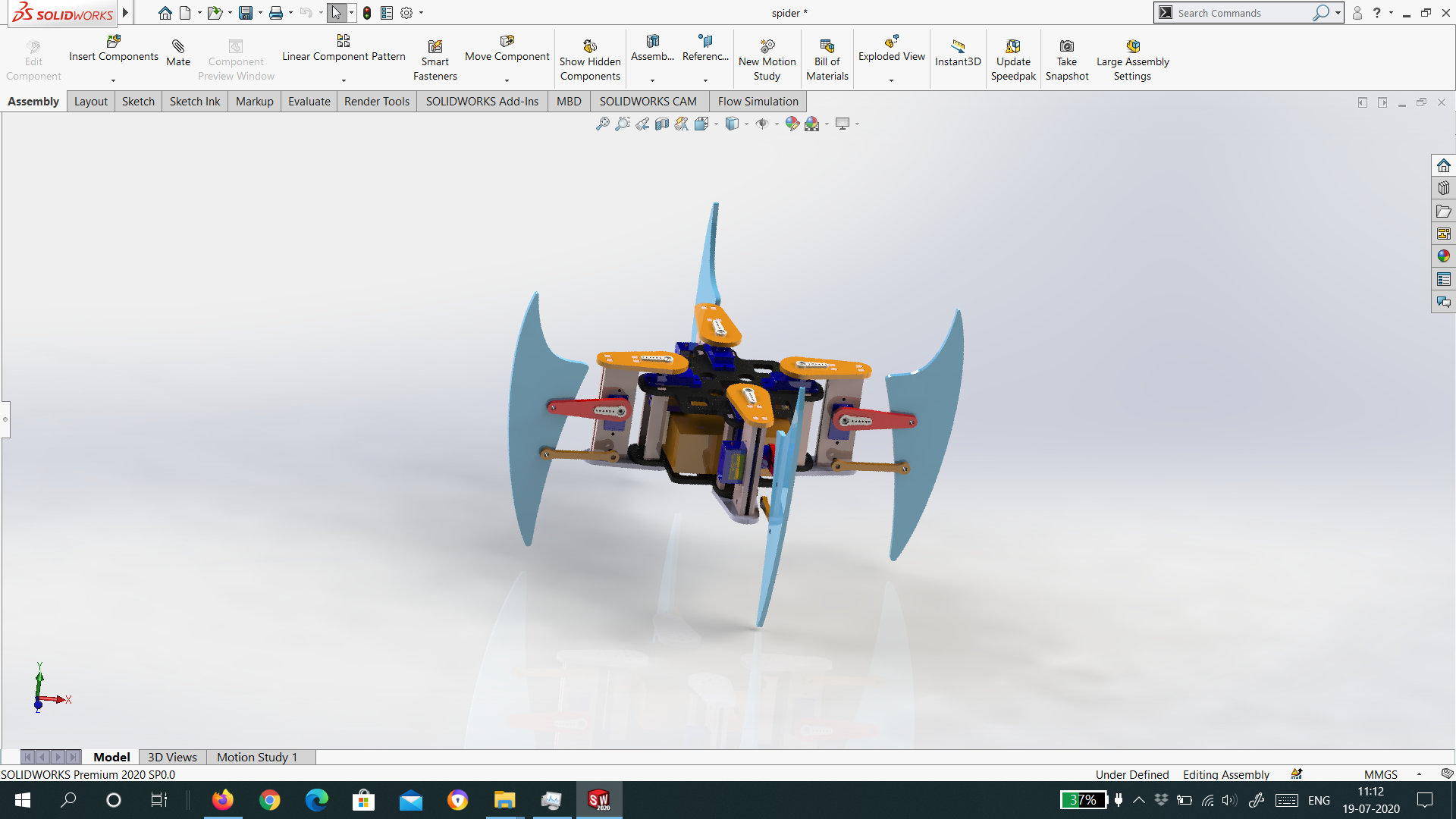
En total, el robot consta de 26 partes, que se pueden imprimir en una impresora 3D o cortar en plexiglás de 2 mm. Usé láminas de plexiglás rojo y azul de 2 mm para que el robot se pareciera a Spiderman.
Hay varias conexiones en el cuerpo que se pueden asegurar con pernos y tuercas M2 y M3. Los servomotores se fijan con tornillos M2. Instale las baterías y la placa antes de atornillar la tapa. Subí los
archivos necesarios a Github .
Paso 4: conecte y pruebe
Conéctese en el siguiente orden:
- Motor rotativo delantero izquierdo.
- Motor de elevación delantero izquierdo.
- Motor de giro trasero izquierdo.
- Motor de elevación trasero izquierdo.
- Motor giratorio trasero derecho.
- Motor de elevación trasero derecho.
- Motor de giro delantero derecho.
- Motor de elevación delantero derecho.
Inicie el robot deslizando el interruptor.
Paso 5: mejoras futuras
Cinemática inversa
El código actual utiliza un enfoque posicional: establecemos los ángulos que deben girar los motores para realizar un determinado movimiento. La cinemática inversa le dará al robot un andar más sofisticado.
Control de bluetooth
El conector UART en la placa le permite conectar un módulo Bluetooth, por ejemplo, HC-05, para controlar el robot de forma inalámbrica desde un teléfono inteligente.