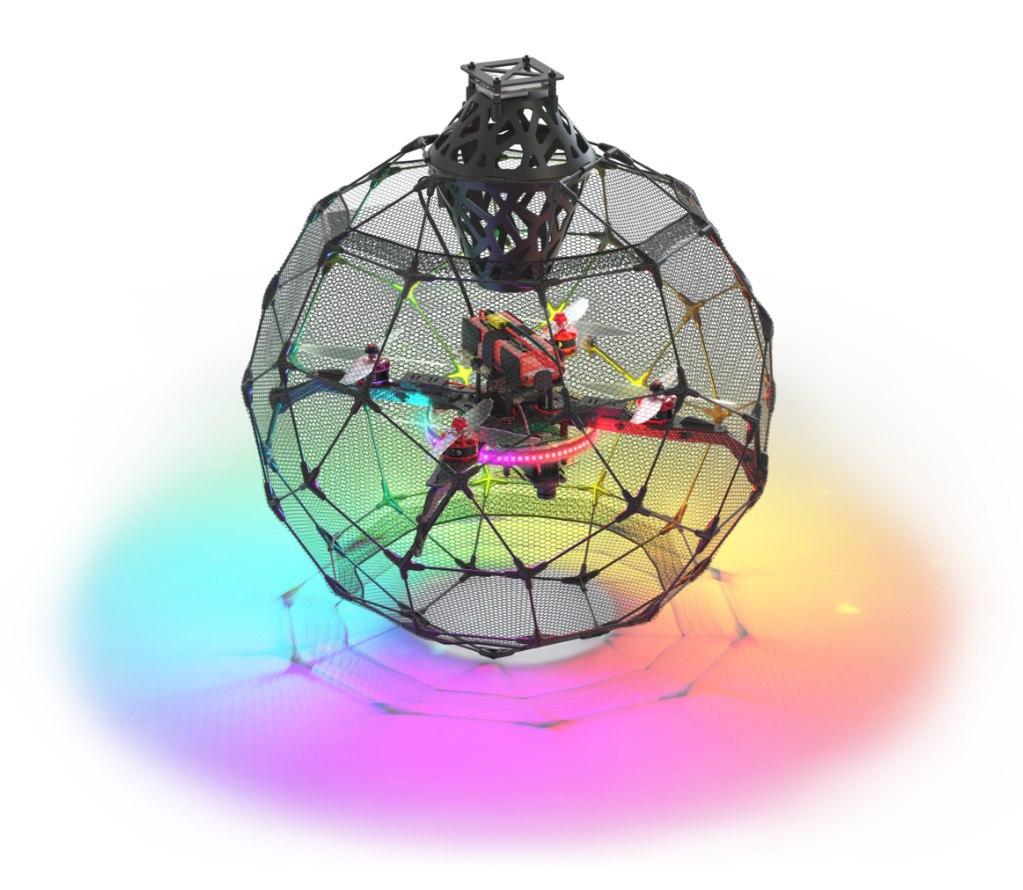
Muy controvertido, muy inusual, muy extraño, ¡pero funciona! En la intersección de la arquitectura, la robótica colaborativa y los vehículos aéreos no tripulados. Presentamos: Tensodrone ™.

Tensodrone (Tensodron): vehículo aéreo no tripulado (UAV) de tipo multirotor de nuevo diseño con protección contra colisiones, hecho según el principio de tensegridad. Este enfoque mejora la resistencia al impacto con menos peso al combinar la jaula protectora con el diseño del marco estructural.
El proyecto es un ejemplo vívido de la interacción de varios equipos del Centro de Competencia NTI en la dirección de "Tecnologías de Componentes Robóticos y Mecatrónicos" sobre la base de la Universidad Innopolis.
Los drones están cayendo

Fuente
Solo porque vuelan. Sistemas de control, motores, sensores, pilotos automáticos, computadoras de a bordo y software: los desarrolladores intentan hacer todo esto de la manera más confiable posible, pero el riesgo de estrellar el helicóptero permanece. Y si esto es un prototipo, entonces a la vez necesitas hacer varios (¿piezas o docenas?) Para depurar. Además de los factores internos, obviamente, los factores externos permanecen: viento, obstáculos pasivos, influencia activa.
Casi nadie discutirá, los drones caen, chocan, se vuelcan.
Puedes intentar evitar esto, puedes prepararte para ello. ¿Que es mejor? Depende del desarrollador, usuario y legislador.
Estoy a favor de utilizar ambos enfoques juntos. Pero en este artículo nos centraremos en cómo evitar las consecuencias de una caída o colisión de un UAV.
Estructuras protectoras
El enfoque más sencillo para evitar las consecuencias de una caída o colisión de un UAV es una jaula protectora y otras estructuras protectoras. Aquí hay dos tareas: proteger al dron de daños y proteger el medio ambiente donde opera el dron y las personas que se encuentran en él del dron.
La versión básica del diseño, más probable que proteja a las personas del dron, es la protección de la hélice.

Dron AR.Drone 2.0 con protectores de hélice. Fuente
También hay soluciones divertidas inspiradas en origami con protectores de hélice flexibles plegables (e incluso diseños de marcos) desarrollados por el equipo del profesor Dario Floreano en EPFL.
El diseño predominante para proteger el dron en sí (y al mismo tiempo a las personas) es una jaula protectora. El cuadricóptero en sí está dentro de la jaula.
ZumbidoClover del COEX ruso La
empresa rusa COEX fabrica drones con fines de entrenamiento, que por defecto cuentan con protectores de hélice y, opcionalmente, una jaula protectora.
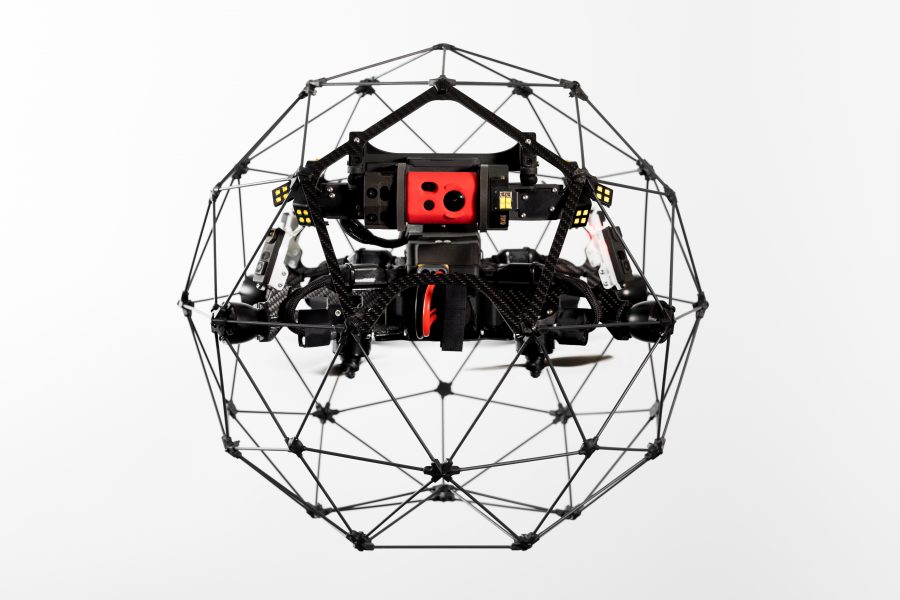
Drone capacidad de vuelo ELIOS
suizo (Suiza -? Dronostroeniya capital), la compañía la capacidad de vuelo - produce quizás el más ELIOS copter éxito comercial con una jaula protectora para llevar a cabo inspecciones en los locales. La originalidad del diseño consiste en unir la jaula protectora al marco del helicóptero sobre una suspensión móvil con posibilidad de estabilización.

Drone Dronistics EPFL
startup Dronistics (Suiza nuevamente, del grupo Dario Floreano) ofrece un dron con una jaula plegable para la entrega segura de mercancías.
Todavía romper

La desventaja de tales drones es el aumento en la masa de la estructura: debe llevar una jaula protectora y accesorios para el UAV. El deseo de reducir el peso de la estructura protectora conduce a una disminución de su resistencia.
Drones con geometría variable
Otra dirección relacionada con la idea de un dron resistente (y no solo) son los drones plegables y los drones con geometría variable (plegable y morphing). Esto se refiere a la capacidad del dron para cambiar su geometría en vuelo. Se fabrican estructuras plegables para evitar daños al dron (por ejemplo, el dron puede "encogerse" antes del impacto), y el dron puede, por ejemplo, plegarse a un tamaño compacto para volar a través de ventanas estrechas.
Es posible que hayas visto un video de un dron de geometría variable genial de Suiza (sí, ETH + EPFL + UZH nuevamente). Esta idea también es interesante y cercana a nosotros, te diré por qué más adelante.
Drone con geometría variable
Tensegridad
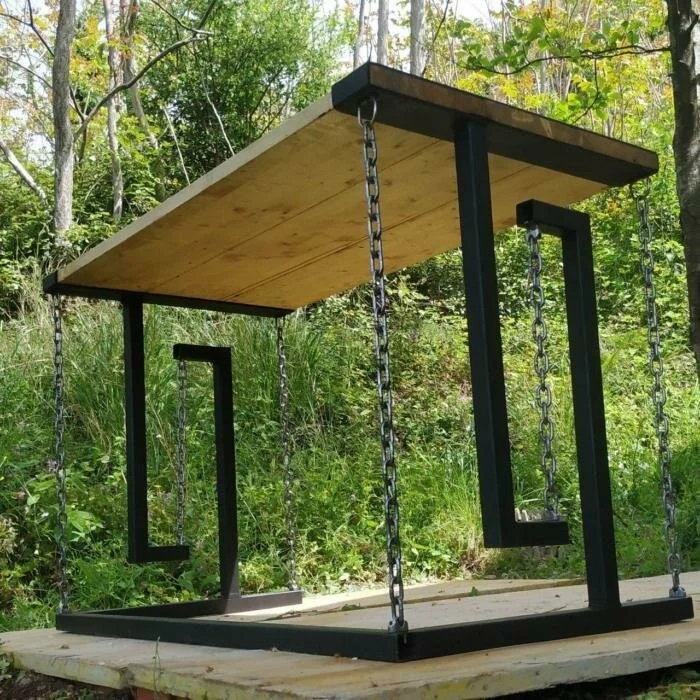
Tabla de tensegridad. La fuente de
Tensegridad es la capacidad de las estructuras de enmarcado para explotar las interacciones de elementos sólidos compresivos con compuestos tensores para garantizar que cada elemento funcione con la máxima eficiencia y economía ( Wiki ). El término es relativamente nuevo, apareció en la década de 1960. La mesa de la imagen de arriba se para (o cuelga) sin patas precisamente debido al principio de tensegridad.
Hay muchas aplicaciones modernas de este enfoque en la arquitectura, de donde apareció, principalmente en el diseño de puentes.

El puente Tensegrity más grande del mundo, Australia. Una fuente
Usos alternativos :)
Tensegridad en robótica
Una de las áreas más antiguas de la robótica, los manipuladores industriales, está experimentando ahora una nueva etapa en su desarrollo, asociada a los llamados. robótica colaborativa. En el discurso de los especialistas en este campo, dos términos se pueden escuchar con gran frecuencia: rigidez y cumplimiento.
En robótica industrial, el término cumplimiento se refiere a flexibilidad y cumplimiento. Un robot rígido no compatible es un dispositivo que funciona sin importar las fuerzas externas que actúen sobre él. El efector final del robot seguirá exactamente el mismo camino cada vez. Por otro lado, el efector final de un robot compatible puede moverse a lo largo de diferentes trayectorias para completar una tarea y aplicar diferentes fuerzas al objeto. Por ejemplo, un robot puede agarrar un huevo sin aplastarlo. La rigidez controlada está en el corazón de la robótica colaborativa.
Las ideas para usar Tensegrity en robótica provienen de la robótica colaborativa y "blanda". Las estructuras de tensegridad son ligeras, resistentes a los impactos y permiten controlar su rigidez (cumplimiento) y configuración (forma).
El ejemplo más famoso de la aplicación de la tensegridad en robótica es el Super Ball Bot de la NASA, un robot terrestre plegable, que se planeó para estudiar superficies planetarias. Gracias a la estructura esférica de cables y cables, el robot puede soportar una caída desde una gran altura cuando es arrojado al planeta desde una nave espacial. Una vez en la superficie, el robot puede rodar en cualquier dirección controlando las longitudes de los cables y / o varillas.
Video de IEEE Spectrum en NASA SUPERball v2
Robots de tensegridad en la Universidad de Innopolis
En UI desarrollamos un aparato matemático para modelar, diseñar y controlar sistemas robóticos con estructuras acopladas a tensiones con rigidez variable (esto es Tensegrity). Este es un trabajo fundamental que se puede encontrar en una amplia variedad de robots, como manipuladores de tensegridad o robots andantes.
El manipulador de la tensegridad y licenciado e investigador de UI Oleg Balakhnov
Oleg fue el primero en comenzar a crear prototipos de robots de tensegridad aquí, primero a partir de palos de madera y bandas elásticas. La foto de la construcción de palitos de sushi, quizás, también guarda la historia de las charlas.
Vibrobot de Tensegridad
-
-
Efecto sinergico

Probablemente ya lo tienes
Tengo un dron, tengo tensegridad. ¡Uf! (Tensodrona)
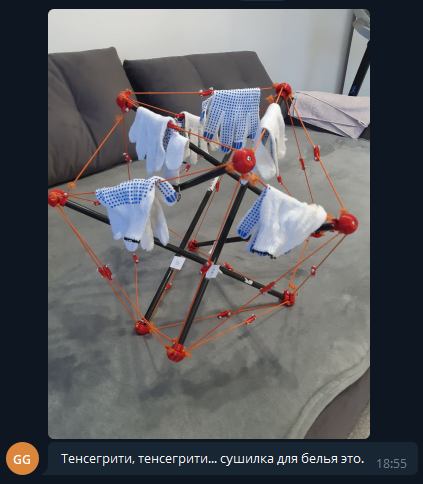
Una vez en nuestro garaje pasé por un diseño extraño y llamativo:
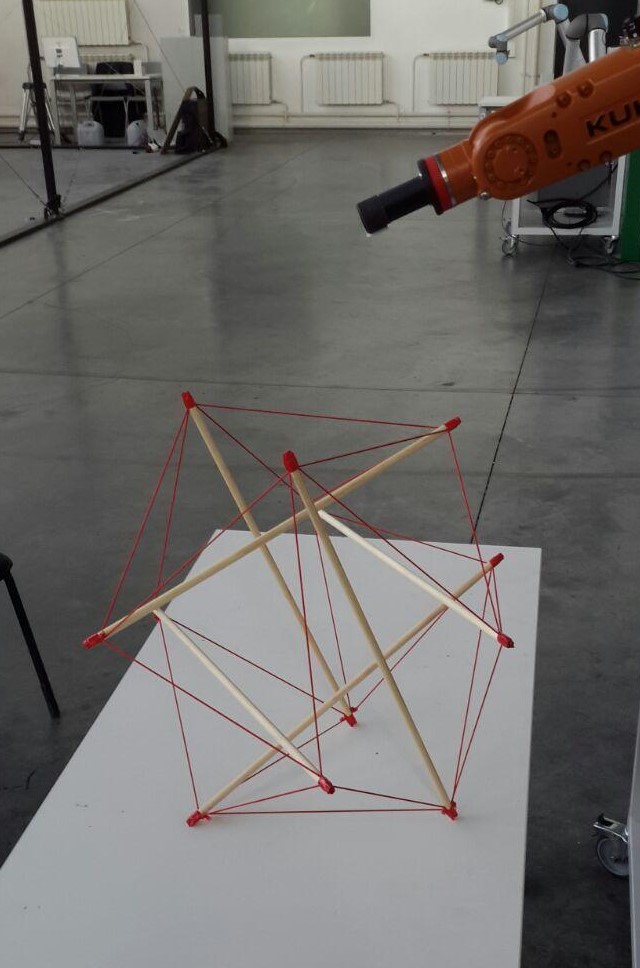
pregunté: "¿Qué es esto?" Me dijeron: "una estructura que no se puede matar; déjela caer, pero no se rompe".
Me rompí (en realidad solo me arrugué, cambié de forma porque las bandas de goma estaban sueltas y desalineadas). ¡Pero necesitamos un diseño así para drones! Y comenzamos un experimento aventurero.
Video de prueba de supervivencia de tensegridad
Una prueba más dura
Squishy robotics — , - , ,
Squishy robotics — , - , ,
Aventuras

Sergey aprueba el experimento aventurero. Jeff Bezos también es
Sergey Savin: un investigador principal, profesor asociado, un científico serio con un doctorado a los 25 años y muchas publicaciones de calificación. Es uno de los padres fundadores de Tensegrity Robotics en UI y ha recibido varias subvenciones para el desarrollo de Tensegrity in Robotics.
Igor está considerando una idea
Dmitry, Oleg y Haney recogen el primer diezcodron (parece algo). Dmitry DevittGigaFlopsis- un investigador y estudiante de posgrado de la Universidad y el que aplicó las tecnologías más modernas - tubos de carbono e hilos de kevlar, impresión 3D con carbono y plástico blando, implementó todo y lo hizo volar.

El proceso de ensamblaje del tensodron

Ura. sucedió!
¡Moscas!
Dmitry también es el primer actor después del tensodron en los videos épicos de sus vuelos. Velocidad:
Un juego de dos actores protagonizados por ellos mismos. Video de DeluuusiOn
Más sobre la construcción de prototipos
El diseño del primer prototipo de dron resultó de la siguiente manera:
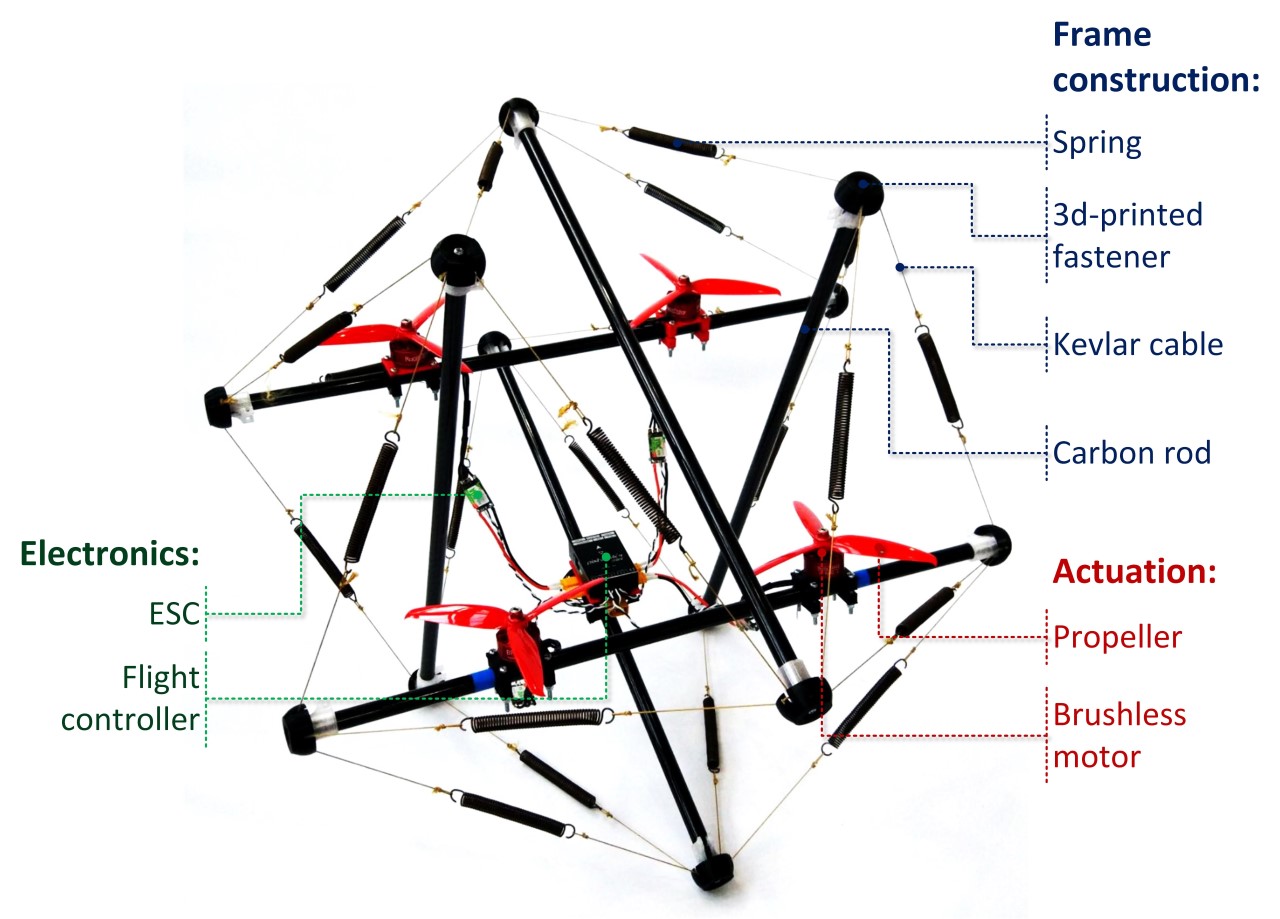
El diseño del prototipo de tensodron de la Universidad de Innopolis
Se utilizó el diseño básico de tensegridad de seis varillas. A diferencia de los cuadricópteros rígidos, tenemos dos pares de motores de hélice montados en diferentes vigas. Además, ninguno de ellos está conectado rígidamente al piloto automático, que se encuentra en el haz inferior.
Los componentes electrónicos y electromecánicos a bordo del prototipo de dron incluyen:
- Piloto automático CUAV Pixhawk v5 mini;
- Batería 3s 1400mAh;
- Regulador Racerstar REV35 35A BLheliS 3-6S ESC;
- Motores Racerstar Racing Edition BR2205 2300KV;
- Sensores IMU MPU9250.
Los cables están hechos de fibra de Kevlar con resortes personalizados. Las varillas están hechas de tubos de fibra de carbono. Las tapas de los extremos y otras piezas pequeñas están impresas en 3D.
Problemas de manejo
El principal problema de control en comparación con un dron duro convencional son las vibraciones, que, en primer lugar, son de mayor amplitud y, en segundo lugar, son diferentes para el controlador y diferentes motores, porque se instalan en diferentes vigas (aunque esto también puede ser una ventaja: aislamiento de vibraciones).
Pruebas tempranas de Gimbal Tensodron: Vibración (perdón por el video vertical)
Primeras pruebas del tensodron en vuelo: vibración
No estamos solos
, .
( ), , Imperial College London:
, : — .
.. , , , .
, , :
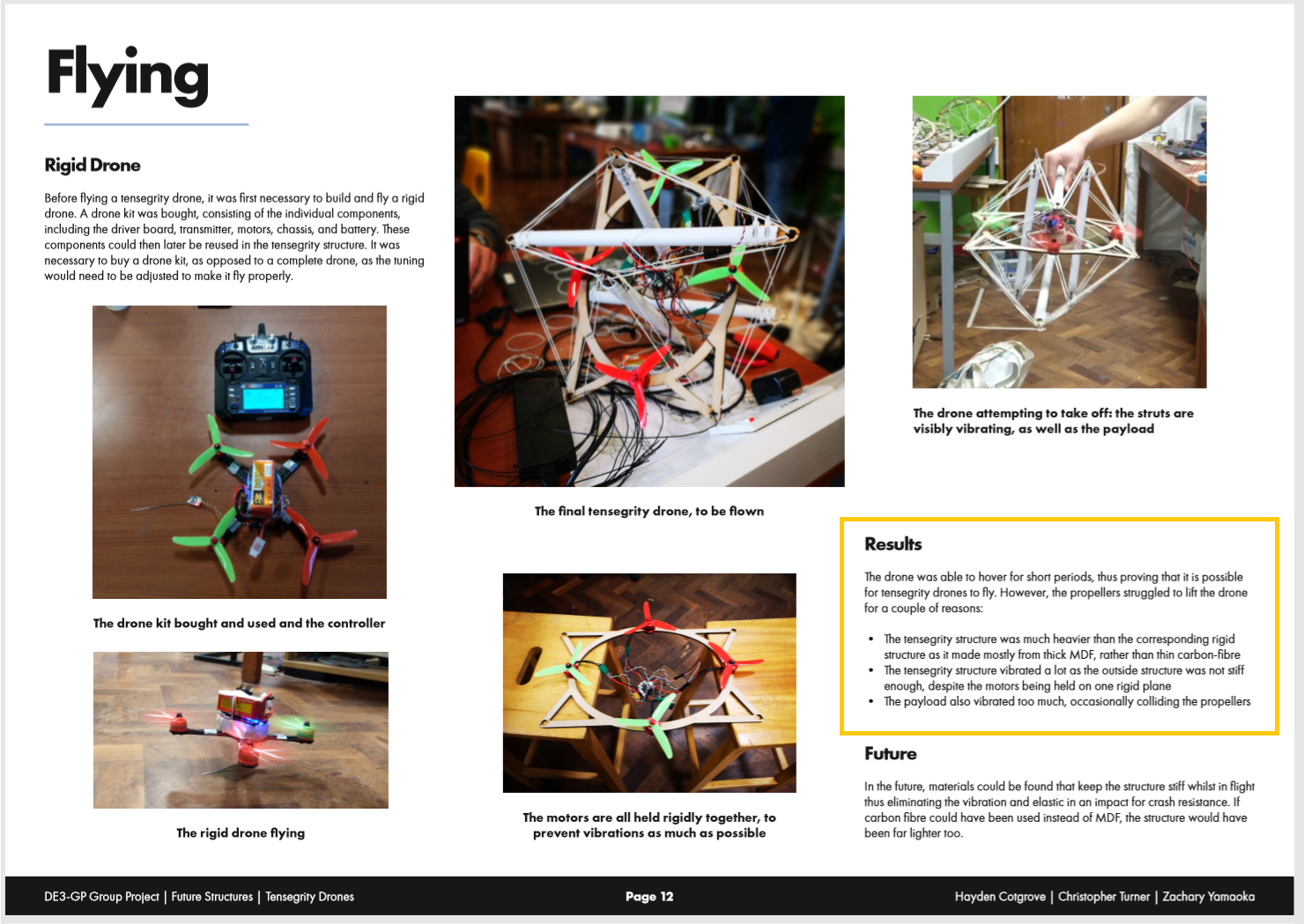
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
- The tensegrity structure was much heavier than the corresponding rigid structure as it made mostly from thick MDF, rather than thin carbon-fibre
- The tensegrity structure vibrated a lot as the outside structure was not stiff enough, despite the motors being held on one rigid plane
- The payload also vibrated too much, occasionally colliding the propellers
Resolvemos estos problemas desde dos lados: mejorando el diseño para reducir las vibraciones durante el vuelo y desarrollando algoritmos de control y estimación del estado para suprimir las vibraciones y un mejor control, incluida la consideración de datos adicionales de los sensores IMU en los haces y un modelo dinámico de la estructura de tensegridad.
Caída al suelo seguida de despegue, en interiores (sin instalación)
Algunos videos de prueba más
, , . , .. .
( )
( )
¿Que sigue?
Investigación
Todavía quedan muchas cosas interesantes por delante:
Solicitud
Ahora, esta cosa vuela por sí sola en una misión determinada (incluido el GPS en la calle y en interiores; usaremos la odometría visual). Para nosotros, la aplicación adicional para la inspección de locales es obvia.
Excepto por el control y la forma de bajo nivel, el tensodron es un dron regular, integramos nuestros algoritmos de planificación de movimiento en él para la exploración autónoma y la evitación de obstáculos.
Un ejemplo de cómo realizar una inspección automática. Proyecto de maestría de Victor Massague, nuestro graduado y en un futuro cercano, con suerte un empleado de Barcelona
Y de nuevo investiga
El potencial del diseño del dron Tensegrity es mucho mayor que el de un simple dron.
¿Recuerdas el dron plegable del video de arriba? ¿ Y SUPERball ?
Entonces, si cambia activamente las longitudes de las varillas o la tensión de los cables del dron tensegrity, puede controlar su configuración (o, más simplemente, la forma).
Resulta Tensodrone Morphing Plegable. Estamos investigando activamente en esta área.
Tensodron (concepto) de geometría variable de la Universidad de Innopolis La

aplicación de la tensegridad para un avión abre nuevos desafíos de investigación. El prototipo del diseño ya muestra que la idea funciona y puede usarse para proteger el UAV.