Cuando se implementa un sistema de control de posición de objetos, a menudo se usa una estructura de dos bucles, que incluye dos reguladores: la posición de carga y la velocidad del actuador. En este caso, es necesario ajustar simultáneamente ambos reguladores. Esta tarea se puede resolver utilizando la herramienta Sintonizador del sistema de control .
Modelo de sistema
, , .


Electric actuator Load : .
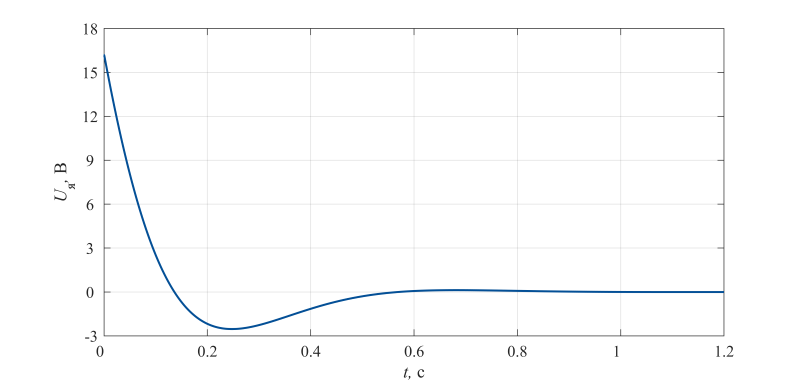
, ±24 , clamping .
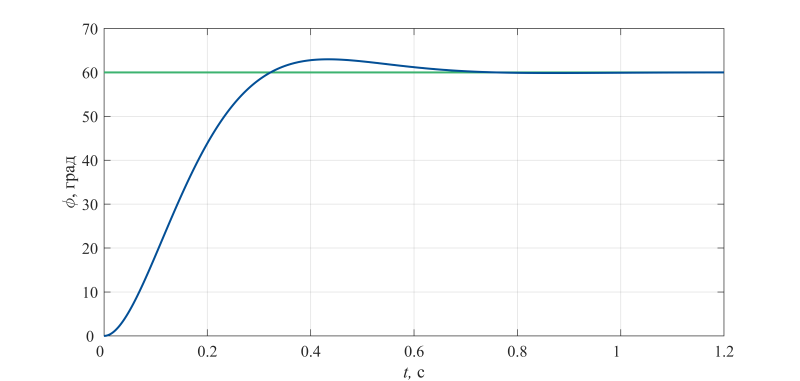
, ±60°.
, .. , , 2.5 .

:
- (Overshoot) 5%;
- (Settling time) 1 .
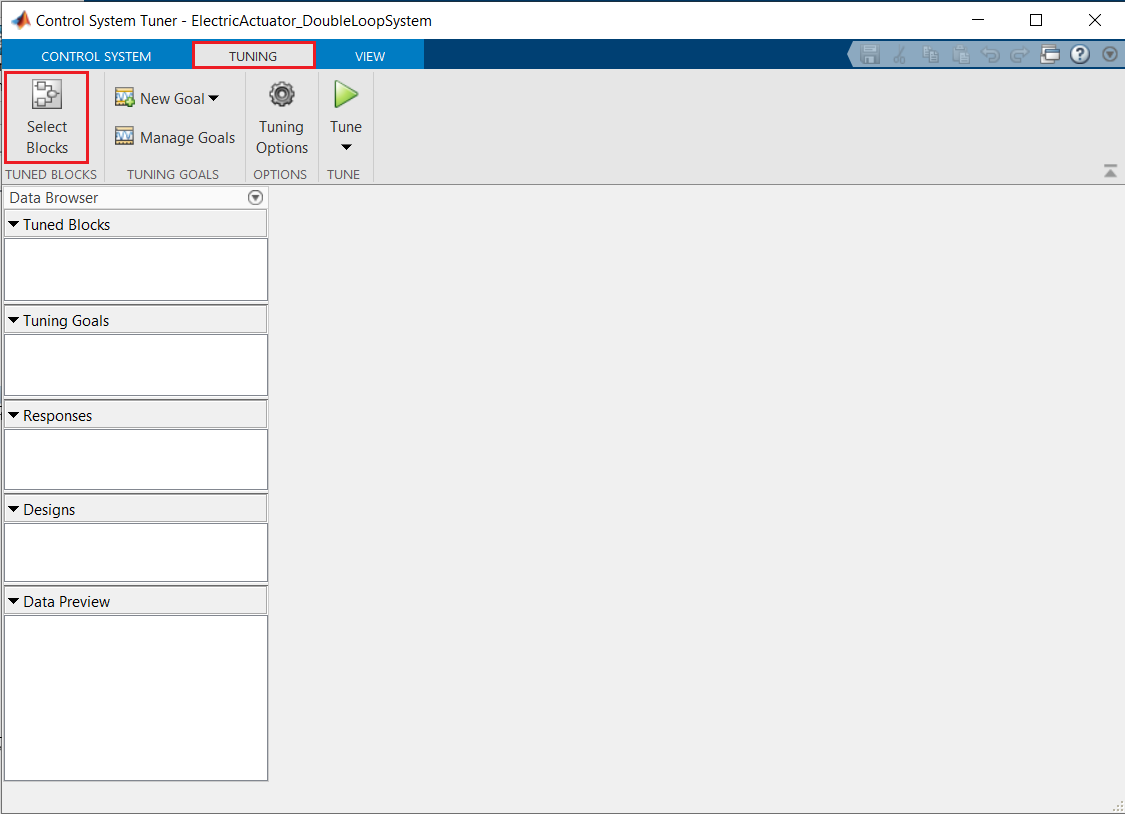
Control System Tuner APPS Simulink, CONTROL SYSTEMS.
:
TUNING Select Block.
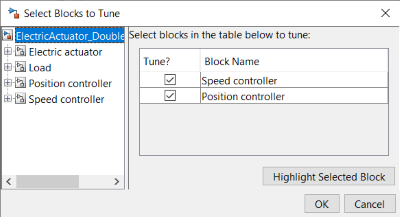
Add Blocks .

OK. Tuned Blocks Data Browser.
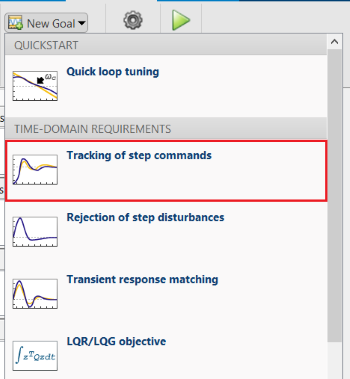
. New Goal Tracking of step commands TIME-DOMAIN REQUIREMENTS. Step Tracking Goal.
.
Specify step-response inputs Specify step-response inputs
Add signal to list → Select signal from model.
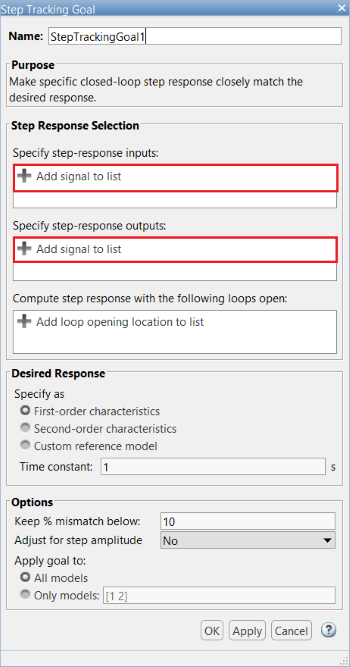
, Reference Position. . Select Signals . Add Signal(s).

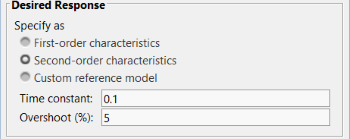
Desired Response . (First-order characteristics), (Second-order characteristics) (Custom reference model). .
Time constant () . Overshoot (%) — (). () () [1]:
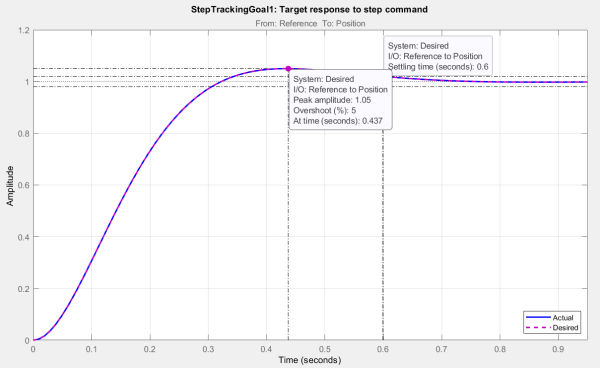
, , , 0.1725 . , 0.1 . . .
: , .. , , . Tune . Data Browser Data Preview . Tuning Goals , . . , .
CONTROL SYSTEM Update Blocks.

.