Este pequeño volumen de trabajo se realizó con urgencia con fines educativos y de demostración hace aproximadamente un año sobre la base de un modelo de cuerdas desarrollado previamente. Como de costumbre, luego de permanecer inactiva durante cierto tiempo, recientemente me llamó la atención.
No tiene sentido decir qué es Scilab: el lector sabe cómo utilizar Internet.

Interesante para el lector que ya está familiarizado con Scilab, este trabajo puede ser una aplicación bastante no trivial de esta herramienta. Esto se refiere al enfoque de "elementos finitos" para el modelado del sistema y la visualización de animación de los resultados con un osciloscopio. Por supuesto, hay herramientas especialmente "afiladas" para la mecánica, pero, repito, el objetivo era probar Scilab con urgencia.
Para aquellos que no estaban familiarizados con esta herramienta simple y visual antes, será interesante saber esto. Todo el proceso de dominar este tipo de software hasta ahora desconocido (programación visual), desde el momento de instalar el Xcos gratuito hasta la creación del siguiente texto, me llevó cinco días. Un modelo más simple de un sistema con un grado de libertad finalmente estuvo listo el segundo día. Y para usted, creo, las cosas en el estudio de este entorno de software, si lo desea, no irán peor, así que hágalo.
El texto en sí mismo, quizás, es demasiado lacónico, ya que originalmente no estaba destinado a una audiencia amplia. Pero si el lector tiene alguna pregunta, intentaré recordar los detalles y responder a estas preguntas. Entonces.
El sistema mecánico ("cuerda vibrante en un medio viscoso"), considerado en detalle en este artículo , representa lo siguiente:
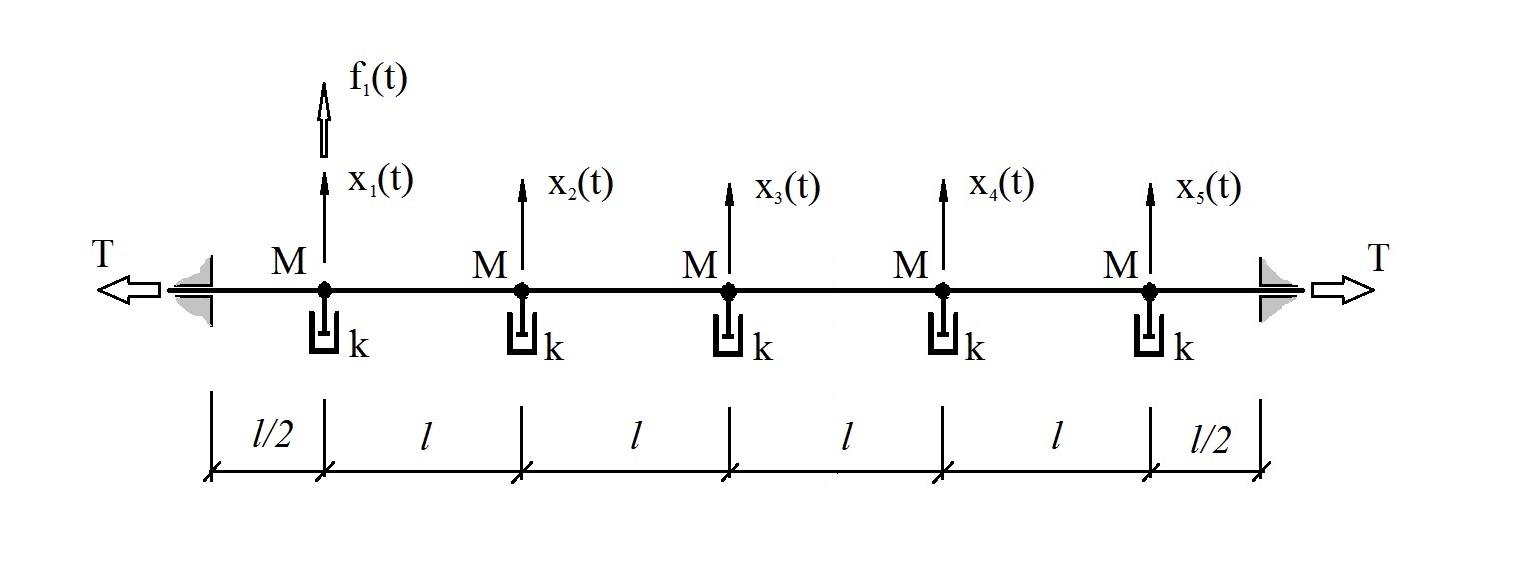
donde Δt = 0.01s, l = 1m, M = 1kg, k = 10 kg / s, T = 2000H
Para simplificar el modelado y Ampliando las posibilidades de modificar el modelo, el modelo se descompone en elementos que

fueron modelados como subsistemas ("superbloques").
El siguiente "diagrama" (modelo) está integrado en el sistema de programación visual Xcos
El "diagrama" (modelo) permite simular el comportamiento del sistema bajo la influencia de un solo impulso aplicado al nodo (elemento) No. 1, registrando y mostrando gráficamente la influencia externa en el nodo No. 1 y la respuesta (desplazamiento) del sistema en los nodos No. 1,2,3, y también mostrar visualmente el comportamiento del sistema en forma de una imagen condicional animada.
Cada uno de los cinco "superbloques" (subsistemas) incluidos en el "diagrama" representa lo siguiente

El bloque recibe del sistema principal datos sobre influencias externas, longitudes y desplazamientos de elementos conjugados, tiempo de reloj, valor del intervalo de muestreo de tiempo y tensión de la cuerda. El bloque en su configuración contiene datos sobre su longitud, masa y factor de amortiguación, que se pueden cambiar con fines de simulación. (La posibilidad de bloquear el bloque declarado por el desarrollador de Xcos no pudo realizarse debido, aparentemente, a fallas del software.)
El bloque integra la ODE lineal correspondiente por el método de diferencias finitas. Las condiciones iniciales de integración cero se implementan utilizando los valores predeterminados del sistema Xcos.
El bloque transmite datos sobre sus movimientos (en el tiempo del reloj del sistema) y la longitud (constante) al sistema principal.
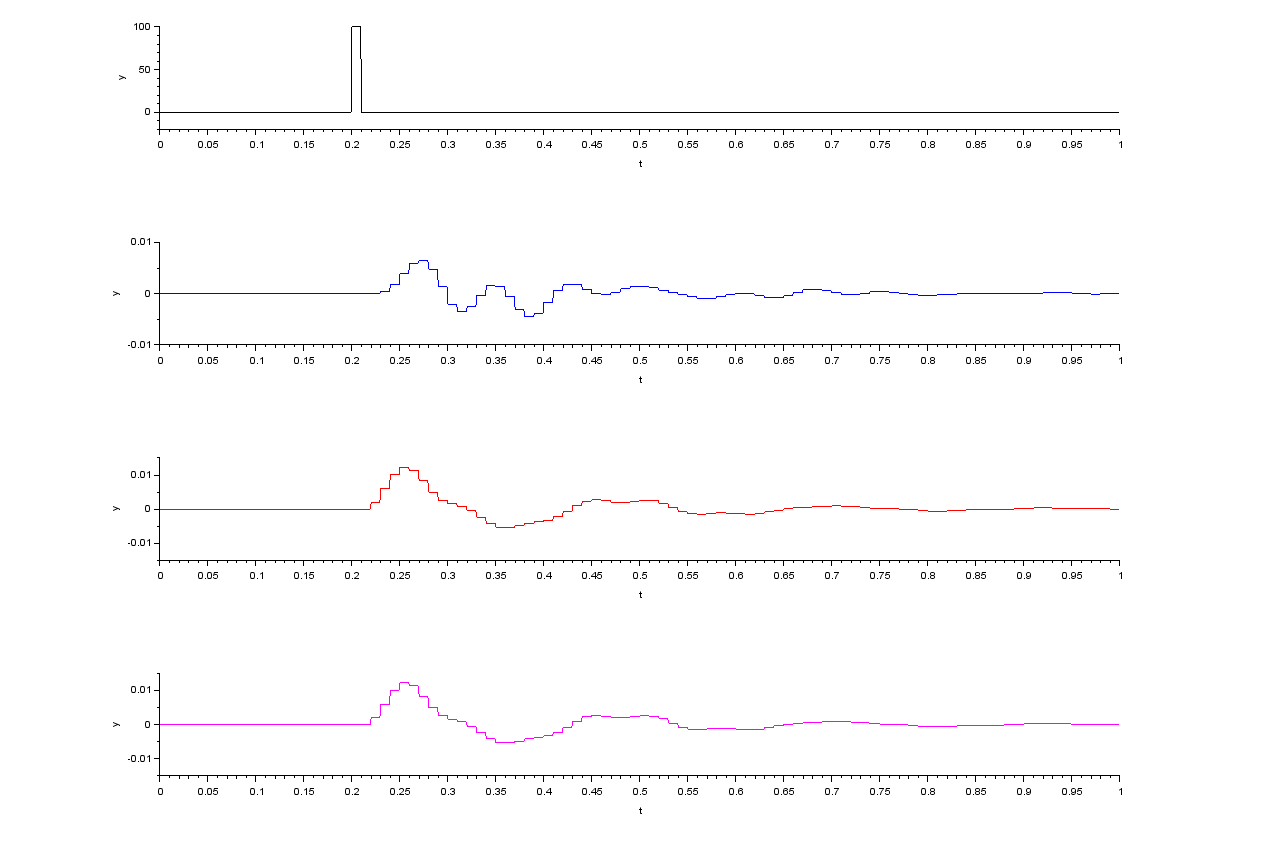
Se obtuvieron los siguientes resultados de la simulación.

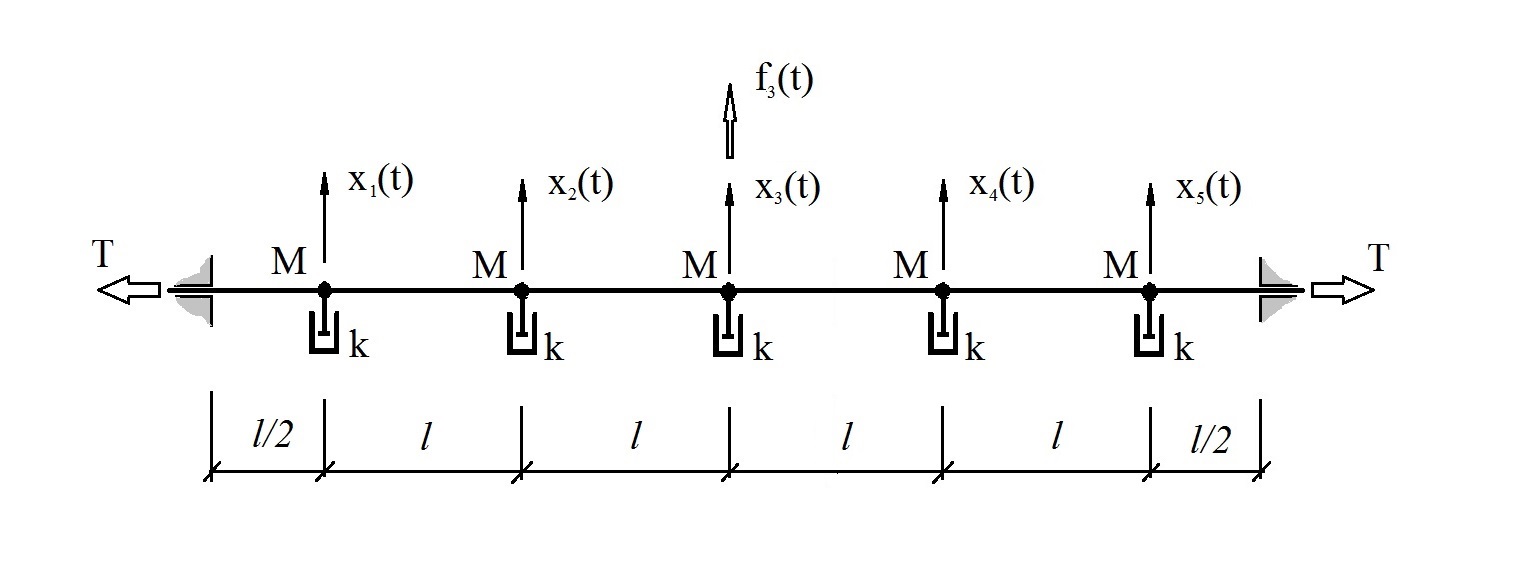
Además, con el propósito de una divulgación más completa de las propiedades de resonancia del sistema, se realizó una simulación similar a la anterior, con una influencia externa aplicada a la mitad de la cuerda (en el nodo No. 3).

Se obtuvieron los siguientes resultados de simulación:

Eso es todo. Buena suerte en el aprendizaje de Scilab, a todos.